弱磁控制及其與磁極位置的關系分析

同樣以11kw額定電流為25A,磁極位置 偏角為θ=30°的電機為例:
本文引用地址:http://www.j9360.com/article/266054.htm①當Id1*=0時,Itrq1=25A,根據式5以及式6得,Im1=Iq1*≈28.9A,此時電機的輸入相電流Im1比額定電流要大。
②當Id2*=-10A時,Itrq2=25A,則Iq2*≈23.1A,此時由于Id2*在q軸坐標上有力矩正分量,使得當電機輸出力矩不變的情況下,Iq2*可以變小,最終電機輸入相電流Im2與額定電流基本相等。
③當Id3*=-15A時,為了使電機輸入相電流Im3=25A保持不變,則Iq3*=20A,此時由于Id3*在q軸坐標上有力矩正分量,Itrq3≈24.8A,即電機輸出力矩會略為下降。
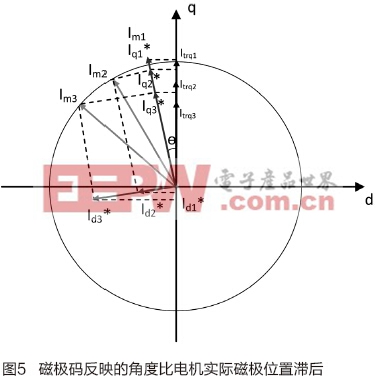
如圖5所示,由于磁極碼不正確,此時的Iq*、Id*與Itrq的關系如式7。
![]()
同樣以11kw額定電流為25A,磁極位置偏角為θ=30°的電機為例:
①當Id1*=0時,Itrq1=25A,根據式5以及式7得,Im1=Iq1*≈28.9A,此時電機的輸入相電流Im1比額定電流要大。
②當Id2*=-10A時,為了使電機輸入相電流Im2=25A保持不變,則Iq2*≈22.9A,此時由于Id2*在q軸坐標上有力矩負分量,Itrq2≈14.8A,即電機輸出力矩會有較大的下降。
③當Id3*=-15A時,為了使電機輸入相電流Im3=25A保持不變,則Iq3*=20A,此時由于Id3*在q軸坐標上有力矩負分量,Itrq3≈9.8A,即電機輸出力矩會有更大的下降。
3 磁極碼自動校正方案探討
由上述的三種情況可知,當系統需要進行弱磁控制時,第二種情況雖然在輸出力矩上有效好的能力,但是由于有θ角的存在,d軸上的Id*分量變小,會使其弱磁升速的效果變差。 因此,系統想要獲得理想的弱磁升速控制的效果,就需要有準確的磁極碼數據。我們系統對電機磁極碼自學習功能存在一定的誤差,如何自動獲得更準確的磁極碼,成為了我們研究的內容。
在電梯負載不變的情況下(即其力矩電流Itrq不變),我們通過變頻器向電機分別提供兩次大小不同的Id*,然后各自動運行一次,系統可以記錄分別對應的Iq*,然后根據式6可得:
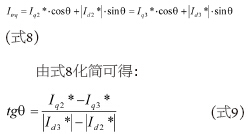
那么,只要通過反正切函數就可求解出磁極碼與實際磁極位置的偏差θ角。
至于如何得知是超前還是滯后,可以通過前后兩次記錄得的Iq*的大小來判定。如果θ角是滯后的話,在電梯負載不變的情況下,系統想要維持恒定的輸出力矩,由于Id*在q軸坐標上有力矩負分量,使得Iq*需要加大才能維持恒定的力矩電流Itrq。因此,當
在得到θ角且知道是超前還是滯后之后,系統就可以自動修正磁極碼數據,從而得到最理想的電梯運行效果。
4 總結
本文從理論上分析了弱磁控制的原理以及其應用的方法,結合電梯的實際情況,分析了弱磁控制與電機磁極位置的關系。并且推算出一種自動修正磁極碼數據的方法,以提升電梯弱磁控制的性能,為真正廣泛地將弱磁控制技術應用到產品打下基礎。
參考文獻:
[1]龔仲華.交流伺服與變頻技術及應用[M].人民郵電出版社,2011
[2]周揚忠,胡育文.交流電動機直接轉矩控制[M].機械工業出版社,2010

逆變器相關文章:逆變器原理
可控硅相關文章:可控硅工作原理
逆變器相關文章:逆變器工作原理
比較器相關文章:比較器工作原理
矢量控制相關文章:矢量控制原理





評論