基于視覺體感雙平衡的防暈動系統

摘要:本項目深入分析了日常生活中暈車暈船等暈動病的發病原因,開創性地從體感和視覺兩個方面對暈動病進行預防和緩解。以Intel Galileo和BayTrail平臺為核心,同時控制三自由度平臺的平衡和穩定攝像頭采集的圖像,實現了體感和視覺的雙平衡,從而屏蔽了外界傾斜和晃動對乘客的影響,更為乘客帶來了娛樂舒適、豐富多彩的旅行體驗。
本文引用地址:http://www.j9360.com/article/262227.htm創意來源
每次乘坐公交車出行,身邊的同學總是被司機的各種轉彎、剎車和加速搞得頭暈目眩。
我們查閱了大量資料,了解到生活中俗稱的暈車、暈船等現象,醫學上稱之為暈動病,為一種平衡失調的疾病。當人眼所見到的運動與身體前庭系統所感覺到的運動不相符時,人就會有昏厥、惡心、食欲減退等癥狀出現。嘔吐反應是由中樞神經系統中的嘔吐中心與內耳前庭系統對抗引起的生理反應。和一般的病癥不同,暈動病導致的惡心并不會在嘔吐后得到緩解。
許多治療惡心和嘔吐的藥物在某些情況下很奏效,但是卻無法根治暈動病,而且效果不佳且存在副作用。
在我們乘坐地鐵和輕軌轉彎的時候,我們可以觀察到外面的景象發生了傾斜,而人體沒有產生離心力帶來的晃動感。我們思考如果能夠將軌道交通的這種方案運用到其他交通工具中去,這將給身邊那些暈車暈船的人帶來巨大的福音。
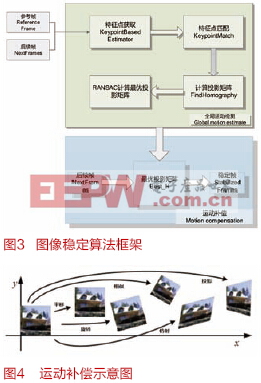
然而,軌道交通依賴于其固定的線路和預定的速度計算出其在每個點精確的傾角,在其他交通工具上,速度和傾角都是實時變化的,因此需要有傳感器和執行機構實現系統的實時平衡。同時,我們還需要配合自穩平臺呈現出穩定的圖像到頭戴顯示設備。
關鍵技術
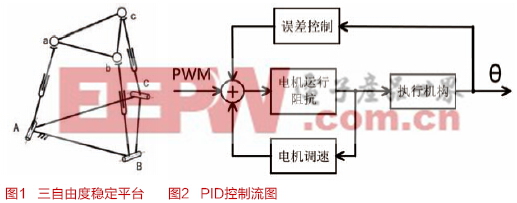
1. 三自由度機械結構
為了實現平臺穩定,我們使用了三自由度機械結構來實現體感平衡。因為此結構為多支桿并行支撐,所以穩定性很高,另外三自由度的控制度很高,因此很適合用作我們的穩定平臺。

pid控制器相關文章:pid控制器原理










評論