DIY一款具運動狀態追蹤功能的遙控玩具,做守護天使

3.3系統軟件架構
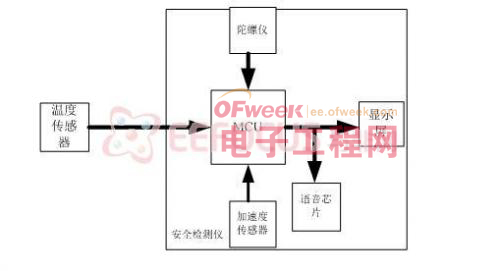
軟件系統分為四個模塊:
(1)通訊模塊實現對無線通訊模塊的傳感信號的收發;
(2)運動模塊實現對電機、電調的驅動,使電機按照指定的方向和速率轉動,實現對飛機的控制;
(3)運動控制模塊,通過參考當前的運動狀態,通過選擇合適的運動控制算法,控制電機的運動狀態進而控制飛機的運動狀態;
(4)主模塊,通過合理的算法和調用,實現各個子模塊之間的配合,完成系統的功能,滿足系統的要求。
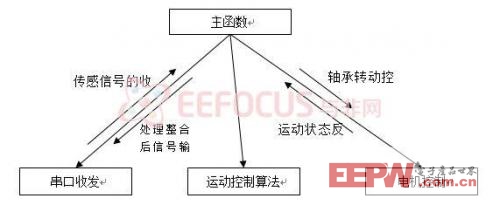
圖6 軟件系統各子模塊
3.4 系統軟件流程
3.4.1通訊系統軟件系統框架設計
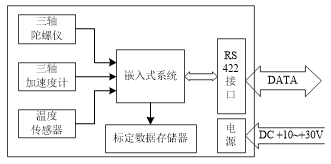
根據STM32F103RE處理器特點,本系統采用ZigBee模塊作為無線接收器,串口對無線收發模塊收一發狀態轉換的控制。處理器控制信號流程圖如圖 7所示。
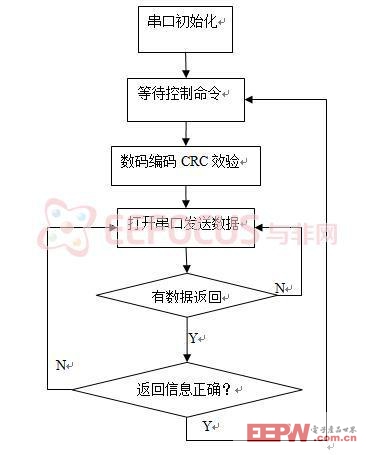
圖7 處理器控制信號流程圖
3.4.2 軌跡計算流程圖
軌跡計算總流程如圖8所示,首先由MCU調用軌跡計算子程序,在子程序中判斷該時刻是否為初始時刻,若該時刻為初始時刻則將速度和位移初始化;若該時刻為非零T時刻,則通過一定的數據處理算法以及T-1時刻的速度和位移數據來獲得T時刻的速度和位移。
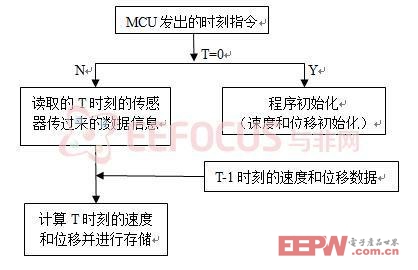
圖8 軌跡計算流程圖


.jpg)


評論