DIY一款具運動狀態追蹤功能的遙控玩具,做守護天使

(4)飛機執行模塊:
跟蹤飛機為一個直升飛機,飛機的飛行姿態是通過由中央處理器輸出的脈沖寬度來控制調節發動機和各個控制舵面來實現的。飛機上有以下幾個地方需要控制:
1) 發動機進氣量,來控制發動機的拉力(或推力);
2) 副翼舵面(安裝在飛機機翼后緣),用來控制飛機的橫滾運動;
3) 水平尾舵面,用來控制飛機的俯仰角;
4) 垂直尾舵面,用來控制飛機的偏航角;
3.2 硬件資源配置
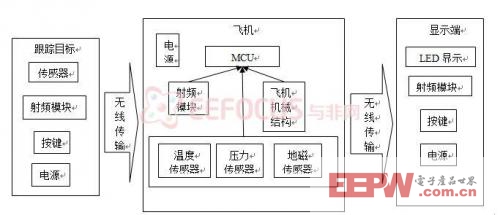
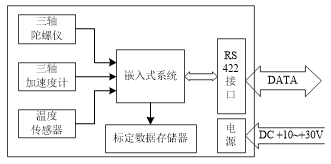
圖5 硬件資源配置圖
主要由三個部分的硬件電路,
(1)跟蹤目標(兒童)的硬件配置,主要的硬件包括位于兒童腰部的運動狀態采集傳感器(加速度計和陀螺儀),用于傳輸數據的射頻模塊,以及基本的電源和開關電路。
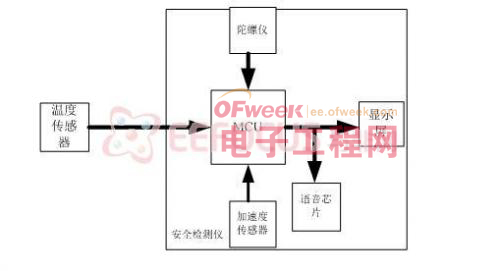
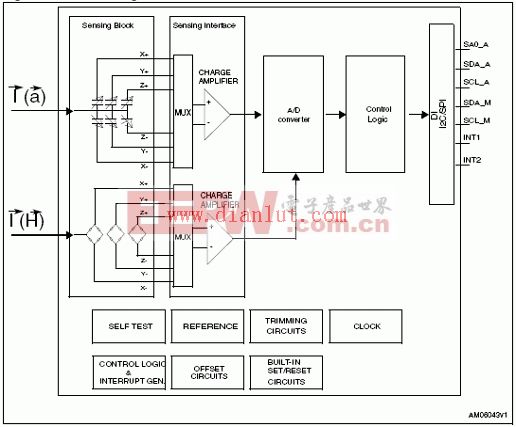
(2)飛機的硬件配置,包括STM32F103RE微控制器,LPR430AL陀螺儀,LY330ALH陀螺儀,LSM303DLH:地磁電子羅盤,LPS001DL壓力傳感器,STLM75溫度傳感器,音樂播放模塊以及基本的電源和開關電路。
(3)顯示端的硬件配置包括LED顯示電路、信號接收的射頻模塊以及基本的電源和開關電路。




.jpg)
評論