基于DSP的仿人機器人運動控制器系統設計

傳統的機器人運動控制器大部分是以嵌入式單片機為核心的,但其運算速度和處理能力遠不能滿足機器人控制系統飛速發展的需要,日益成為阻礙機器人技術進步的瓶頸。隨著以電子計算機和數字電子技術為代表的現代高技術的不斷發展,尤其是高速度數字信號處理器DSP 的出現,從根本上解決了嵌入式系統運算能力不足的問題,并為機器人運動控制系統的改進提供了新的途徑。該文正是從這一點出發, 選用控制能力很強的DSP芯片TMS320LF2407A作為機器人運動控制器的主處理器,設計出一種高性能機器人運動控制器,顯著地提高了整個機器人的運動性能。
本文引用地址:http://www.j9360.com/article/257313.htm1 控制系統結構
機器人的各種運動由各個關節軸系完成,機器人控制本質上是對各關節軸系的控制。每個軸系具有一個自由度,可以完成某一方向的轉動任務,所有軸系同時協調運動就可以完成相對復雜的動作。國防科技大學機電工程與自動化學院機器人教研室最新研制的仿人步行機器人,其內部各關節結構如圖1所示。
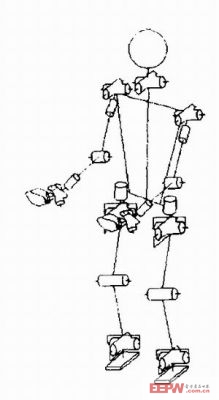
圖1 機器人內部結構示意圖
此機器人共有36 個自由度,分布在下肢、上肢、頭部和手指等各關節。所有軸系均由PWM 脈沖信號驅動控制,運動控制系統的任務就是對這些關節軸系進行控制,具體由各底層控制器實現。整個控制系統采用分布式控制,在結構上可分為3 個層次,如圖2 所示。
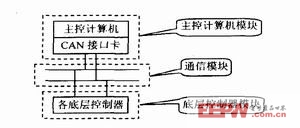
圖2 運動控制系統結構框圖
1.1 主控計算機模塊
主控計算機就是控制系統的“大腦”和司令部,負責整個系統的在線運動規劃、動作及運動控制、語音交互控制、視覺導引控制以及人機交互等功能。主控計算機要求體積小,運算速度快,滿足機器人實時控制的要求,通常采用高性能小板工業控制計算機。它通過CAN 總線接口卡連接到通信總線上,與各底層控制器相連并交互信息。
1.2 通信模塊
機器人控制的信息量大,對通信方面的要求很高,要保證各種信息在控制系統中及時準確的傳輸,通信工具的選擇十分重要,該文選用當前流行的CAN 總線作為通信標準。CAN (Controller Area Net-work) 總線是應用最為廣泛的一種現場總線,也是目前為止惟一有國際標準的現場總線。相對于一般通信總線,它的數據通信具有突出的可靠性、實時性和靈活性,可以滿足文中的設計要求。具體連接方式為:主控計算機通過CAN 總線接口卡連接到總線上,各底層控制器通過總線收發器掛接到總線上。只要所有器件都遵守相同的通信協議,就可以穩定可靠的進行信息傳輸。
1.3 底層控制器模塊
控制器處于整個控制系統的最底層,主要用來控制各運動關節軸系的具體執行過程。控制器接收主控計算機的控制命令對各關節執行軸系進行控制,同時把底層信息反饋給主控計算機,實現大回路反饋,便于主控計算機協調規劃,統一管理。控制器是整個控制系統的核心,也是該文研究的重點,它的性能直接關系到機器人運動能力。
2 控制器詳細設計
基于DSP 的控制器具體結構如圖3 所示。整個控制器根據結構和功能可分為3 部分:主處理器與外圍器件單元、反饋與執行單元、通信單元,各部分如圖3 中虛線所示。
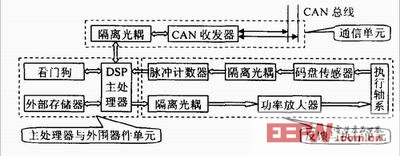
圖3 DSP 控制器結構












評論