用于衛星遙測的Michelson干涉儀測試臺演示器的數字控制

干涉儀帶有激光計量系統,以便測量干涉儀臂之間的光學路徑差(絕對差和相對差),從而使用電動延遲線控制光學路徑差。控制系統可以對激光干涉儀進行測量,將指令發送到延遲線上。
激光干涉法是至今為止用于測量長距離變化的最佳方法。可以使用多種干涉方法,但是所有方法都是基于干涉原理的:由同一個光源發出的兩束或多束光線通過不同長度的路徑最終交匯(匯聚)在用于測量光強的探測器上。探測器上的光強是干涉光線(波)的相對相位的函數,他們可以相互增強,也可以相互減弱。在對干涉信號的分析中,可以得出關于不同光束路徑差的信息。為了測量光學干涉儀兩個臂之間的長度差,最終的方法就是使用Michelson類型的激光干涉儀。激光干涉儀包括兩種類型的激光計量:
● 絕對計量系統(由位于葡萄牙里斯本的INETI機構開發),提供了兩個干涉儀臂之間光學路徑差的實際數值,分辨率較低。
● 相對計量系統(由位于意大利都靈的Alcatel Alenia Space Italia開發),提供了干涉儀臂之間光學路徑差的變化(相對于給定初始值的變化),分辨率較高。
兩種計量系統都利用光學干涉儀原型進行光學干涉,利用控制系統對延遲線發出指令進行電子學層面的交互。
絕對計量用來支持達到Michelson干涉儀的同相位條件,它是由干涉儀多個臂之間的光學路徑達到相干距離范圍之內而構成的,因此較高可見度的邊緣模式在儀器的聚焦平面上形成。
相對計量提供了對OPL變化的測量,從一個給定的初始值開始(這個數值是在達到同相位操作之后的數值),這個數值被控制系統利通過電動延遲線的精調級用于固定邊界圖案(OPD 10 nm)。相對計量是基于Michelson 干涉儀計量的,具有納米級別的分辨率。OPD 干擾需要在對象觀測過程中進行補償,它來自于熱學負載或是發生在衛星內部的振動(例如方向控制系統)等造成的衛星結構變化,通過儀器結構,傳遞至干涉儀鏡面。
同相位系統實驗室演示器
同相位系統是望遠鏡設計最為關鍵的部分。為了測試并且演示同相位系統的概念,即將干涉儀臂之間的OPL 通過一個自由度的延遲線進行均衡,實現了一個實驗室演示器。MIT演示器由一個簡化的實驗室尺寸的光學干涉儀原型組成,實現了與高分辨率衛星望遠鏡相同的光學配置拓撲。
由于同相位系統概念是要控制望遠鏡臂之間的OPD變化,同相位系統的實驗室演示器帶有一條控制延遲線(CDL)能夠在(主要)臂上工作,它跟蹤另一條(從屬)臂的OPL 變化,還帶有一條擾動延遲線(DDL)作用在(從屬)臂上,和預測的體現在衛星望遠鏡上的擾動PSD 相似,引入具有相同功率譜密度(PSD)的OPL擾動。實驗室演示器需要達到的性能必須與衛星望遠鏡要求的性能一致。
控制延遲線由兩個執行器組成:一個粗調臺式電動平移器和一個精調臺式壓電變換器。擾動線僅由壓電變換器組成。粗調器用來從比較大的OPD(例如1 mm)開始達到同相位條件。精調器用來在達到同相位狀態之后,控制并保持兩個干涉儀臂之間的OPD。
同相位控制系統僅僅使用了相對計量測量,在閉環狀態下驅動精調器的控制延遲線。粗調器的延遲線直接由操作員在開環下進行驅動,操作員觀察在絕對計量監視器上,達到同相位條件所需要的位移。粗調器的執行器使用RS232 與便攜式計算機進行連接。軟件接口在NI LabVIEW 中實現,用于設置所有必要的參數,對執行器進行編程,并設置位移指令。執行器的絕對位置一直標識在圖表中。控制粗調器執行器直至達到同相位狀態。在下圖中,顯示了達到同相位狀態的實驗干涉圖。
同相位控制系統硬件式基于便攜式計算機的(帶有2 GB RAM的Pentium 4 2.66 GHz),它通過IEEE 1394接口連接到便攜式NI DAQPad-6052E端口上。即便這個類型的數據采集板卡并非實時設備,還是可以通過數字控制閉環,以1 ms 的控制步長進行控制(可見這并非硬實時性能)。干擾延遲線執行器使用相同的DAQPad-6052E 進行驅動。干擾發生算法與控制算法一起,并行運行在相同的便攜式計算機上。
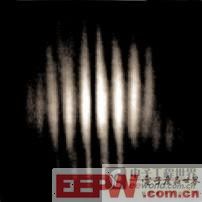
圖2.達到同相位狀態的實驗干涉圖
使用了兩個ADC 通道和兩個DAC 通道。這兩個ADC 通道采集來自相對計量電子的兩個信號,它們用于重建OPD 變化。一個DAC用于驅動精調器控制延遲線的壓電驅動器,另一個DAC 驅動擾動延遲線的壓電驅動器。
控制算法設計根據相同的模型觀測器進行執行,它基于離散時間狀態方程,直接用C 語言算法實現。控制算法程序被編譯為動態連接庫(DLL),通過調用庫函數節點使用NI LabVIEW 與NI DAQ 板卡進行數據交換(來自ADC 的測量和發送至DAC 的指令)。這種解決方案可以測試控制算法(使用C 語言編寫,十分接近最終實際使用的版本),從而可以非常方便地與實驗室NI DAQ 硬件進行連接,而無需使用實際使用的硬件,這樣就節省大量的時間和金錢。同樣,擾動發生算法實現為離散狀態空間方程,并且使用C++ 進行編寫,編譯為DLL 文件。圖5 顯示了控制系統的方塊圖。


評論