基于MC9S12XEP100的旋轉磁場定向測距系統設計

摘要:針對傳統基于地磁導向的連續測斜系統易受干擾以及慣性導航的陀螺測斜系統具有積分漂移誤差,難以滿足連通井導向定位高精度測量的需求,提出一種基于旋轉磁場閉環定向測距的系統方案,完成了該系統的硬件電路設計、軟件設計以及遠距離通訊協議設計,并進行了地面實驗。該測距系統由地面系統和井下系統組成;其中,井下系統用于數據的采集、地面系統用于數據接收和命令傳輸,系統之間數據采用曼切斯特碼傳輸以提高精度降低誤碼率。試驗表明,在鉆頭靠近目標井70m,可檢測到有效信號;在50m范圍內,可以控制測量精度在5%。
本文引用地址:http://www.j9360.com/article/248895.htm引言
隨著石油勘探技術的不斷發展和復雜井的廣泛應用,地層結構變得越來越復雜[1]。作為復雜井重要支撐技術之一——隨鉆測量,在復雜的地層結構中受到國內外鉆井行業的高度關注。隨鉆測量系統中井眼軌跡的控制精度直接關系到連通井井眼對接的成敗,而控制井眼軌跡的關鍵在于井眼運動軌跡的高精度測量[2]。但是,傳統單一井眼進行軌跡預測的隨鉆測量設備難以滿足時下復雜地層中高精度、強抗干擾的要求[3-4]。
為了減小連通井中井眼連通定位誤差,進一步提高測量精度,需要研究作業井與目標井導向定位的新方法。國內外先后開展了其方法的研究,一方面,論證了靜態磁場模型難以直接用于精確定位[5-6]以及開環系統在測量過程中具有一定的累積誤差[7];另一方面,對于閉環動態旋轉磁場測量方法:A.F.Kuckes[8]等人提出了基于旋轉磁場測距系統(RMRS),論證其在50m范圍內具有較好的效果;胡漢月、宗艷波、AI-Khodhori[9-11]等人驗證了該方法用于水平井的對接連通的可行性等。
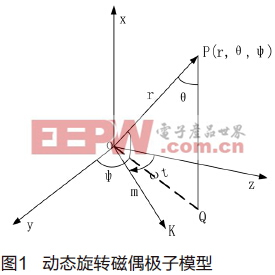
因此,為了測量作業井與目標井的相對位置和相對角度,提出了一種基于旋轉磁場定向測距的方案。通過建立基于動態旋轉磁偶極子模型,完成了井下測量和井上通訊的硬件電路的設計以及上下板之間的通訊協議和軟件的開發。最后,通過地面實驗驗證該方案的可行性。
1 磁測距系統原理
連通井旋轉磁場導向測距系統由地面系統和井下系統組成。其中,地面系統包括地面軟件與上位機、測井絞車;井下系統分為磁工裝和磁測量裝置。磁工裝用于產生一個交變磁場源;磁測量裝置用于獲取在作業井鉆頭處的磁場,測量信號借助測井絞車通過電纜傳輸到地面進行解碼處理;最后,傳輸到上位機進行相關運算處理,得到距離和角度。







評論