基于STM32I和IDP衛星通信模塊的遠洋船舶實時監控系統

摘要:針對遠洋中無GPRS信號不能進行無線通信的問題,設計了以STM32F103VCT6單片機與IDP衛星通信模塊為平臺的遠洋船舶實時監控系統。本系統具有高精準度、實時性強、全天候監控等特點。給出了系統的工作原理、硬件設計與軟件實現方法,詳細分析了中央控制模塊、GPS定位信息采集模塊、無線通信模塊。實驗結果驗證了采用STM32F103VCT6單片機與IDP衛星通信模塊設計遠洋船舶監控系統的可行性。通過該系統,可實時監控遠洋船舶的地理位置信息以及其他信息,最大限度地確保遠洋船舶航運中的安全。
本文引用地址:http://www.j9360.com/article/245750.htm引言
本文采用ARM芯片作為控制核心,設計了一款以GPS定位模塊與衛星通信模塊為依托的遠洋船舶實時監控系統。該系統能夠按照用戶要求定時上傳遠洋船舶的位置信息以及航向信息,解決了傳統船舶定位和救援中出現的問題,保證了船舶動態監測及時、準確、可靠。同時該系統方便擴展其他功能,以便獲得更廣泛的應用。
1 系統整體設計
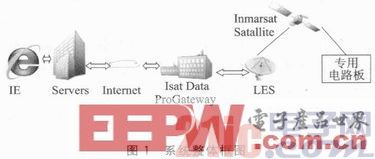
搭載在船舶上的專用電路板實時采集船舶的位置、速度、航向、SOS報警等信息。專用電路板將采集到的數據處理后,經衛星通信模塊發送至海事通信衛星,通過海事衛星將數據傳輸到地面接收站供給用戶使用。系統整體框圖如圖1所示。
2 系統硬件設計
2.1 硬件總體設計
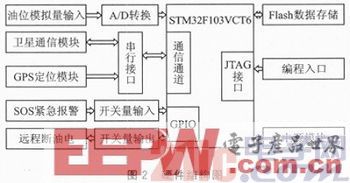
硬件系統采取模塊化設計,主要分為中央處理模塊、GPS定位模塊以及衛星通信模塊等,硬件結構如圖2所示。數據的加工處理及輸入/輸出控制由ST公司的STM32F103VCT6處理器完成。處理器接收到GPS數據后對數據處理并定時上傳加工后的定位數據至地面接收站。GPS定位模塊采用Globalsat公司的ET-314,通過該模塊實時更新GPS定位數據。衛星通信模塊采用加拿大Skywave公司的IDP衛星通信模塊,該模塊通過國際海事衛星(Inmarsat)來實現與地面接收站之間的全天候、廣區域、高可靠性的雙向通信。為了備份長時間的定位數據,采用了SST公司的SST25VF016B芯片作為外部Flash來實現數據存儲的功能。
2.2 中央控制模塊
本系統采用STM32F103VCT6處理器作為主控制芯片。STM32F103VCT6是32位的具備Cortex-M3內核的處理器,最高工作頻率可達72 MHz。
中央控制模塊STM32F103VCT6作為本系統設計的核心部分,負責數據地采集、分析、加工以及安排數據上傳工作。GPS原始數據會實時傳遞至MCU的串口緩沖區。MCU驗證處理后,通過串口發送至衛星通信模塊。SOS報警信息通過設定的GPIO口發送至MCU,通過衛星通信模塊上傳至地面接收站。本模塊硬件原理圖略——編者注。
2.3 GPS定位模塊
定位模塊采用Globalsat公司的Globalsat ET-314芯片,來實現船舶的位置定位與速度采集。Globalsat ET-314模塊使用了SIRF III芯片,具備快速定位、定位精度高、啟動時間短以及探測范圍廣的優點。使用Globalsat ET-314模塊實現功能如下:
①精確地采集到地理位置信息。Globalsat ET-314模塊定位的精確度為10 m。
②精確地采集時間信息。Globalsat ET-314模塊采集到的時間與GPS時間保持1μs的同步關系。
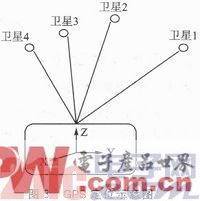
GPS定位的基本方法為空間距離后方交會,此方法需要知道衛星瞬間位置。如圖3所示,假設t時刻在地面上的待測地點放置GPS信號接收機,測定出GPS信號到達此處接收機的時間為△t,根據其他已知條件確定以下4個方程式。其中已知衛星1,衛星2、衛星3、衛星4以及地面接收站的地理坐標分別為(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x4,y4,z4)、(x,y,z);d1,d2,d3,d4為測量偽距;c為光速;
dt為衛星時鐘偏差;dT1,dT2,dT3,dT4為GPS的接收時鐘偏差項。
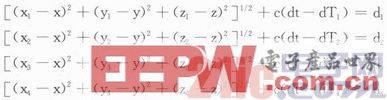
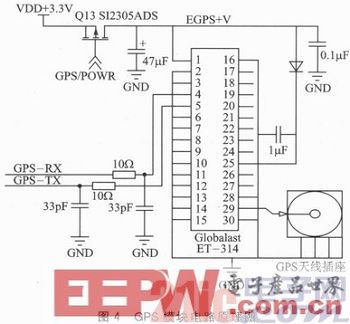
通過聯立這4個方程式,可以得到接收機的地理坐標。GPS定位模塊的原理圖如圖4所示,GPS通過串口與MCU獲得通信。
2.4 衛星通信模塊
衛星通信模塊選用的是加拿大Skywave公司的衛星通信模塊IDP。IDP的通信基于國際海事衛星,通信全球覆蓋不受外界因素限制。IDP還具備傳輸數據能力強的優點,其單次發送數據可達6 400字節,單次接收的數據量可達10 000字節。IDP支持二次開發,方便用戶將IDP接入其他產品中使用。
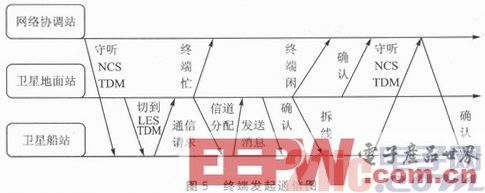
國際海事衛星通信系統是世界上第一個全球性的移動業務衛星通信系統。Inmarsat通信系統基本是由四部分組成,即空間段、網絡協調站(Network Coordination Station)、衛星地面站(Land Earth Station)和衛星船站(Mobile Earth Station)。IDP680即為衛星船站。發送信息經衛星地面站處理后經專用網關轉發至用戶服務器供用戶分析使用。終端發起通信流程如圖5所示。
IDP680為用戶提供了4個可配置I/O口以及1路RS232、1路RS458串口方便用戶集成使用。其接口定義圖略——編者注。
配置衛星通信模塊使用中斷方式接收MCU通過串口傳輸過來的數據。校驗正確后,衛星通信模塊執行發送數據功能。用戶發送的遠程指令,衛星通信模塊接收后通過串口傳輸至MCU,MCU使用中斷方式處理串口傳輸過來的數據。校驗正確后,執行相應的命令動作。

通信相關文章:通信原理



評論