一種智能汽車防撞報警器的設計開發

摘 要:設計并開發了應用于汽車的防撞系統。基于超聲波原理,防撞系統通過發射和接收超聲波信號,測算出時間差,再利用控制系統換算成距離,判斷處理。該系統采用發生器電路、換能器、線性功率放大器。另外,系統采取了三個防干擾措施。由于防干擾措施的實施,使系統能在工業現場中有較小的穩態誤差,有效防止了碰撞事故的發生。
0 引 言
汽車防撞報警器的核心部件是汽車防撞雷達。汽車防撞雷達(俗稱電子眼)之所以能實現防撞報警功能,主要有超聲波這把無形尺子,它測量最近障礙物的距離,并告知車主。超聲測距原理簡單:它發射超聲波并接收反射回波,通過單片機計數器獲得兩者時間差t,利用公式S=Ct/2計算距離(S為汽車與障礙物之間的距離;C為聲波在介質中的傳播速度,C=331.4(1+θ/273);θ為攝氏溫度。本文介紹的超聲測距系統共有4只超聲波換能器(俗稱探頭),分別布置在汽車的前左、前右、后左、后右4個位置上。能檢測前進和倒車方向障礙物的距離,通過后視鏡內置的顯示單元顯示距離和方位,發出一定的聲響,起報警防撞作用。
1 天車防撞報警儀的總體方案設計
1.1 防撞報警儀的主要設計指標
(1)報警距離:5~30 m,根據用戶的具體需要連續可調;
(2)根據用戶的需要選用分檔:0.6 m,1.0 m,1.5 m,1.8m,2.4 m;
(3)電源:車載電瓶12 V;
(4)環境溫度:-20~+70℃;
(5)報警器尺寸:155 mm×155 mm×63 mm,重量:3.5 kg。
1.2 系統總體方案
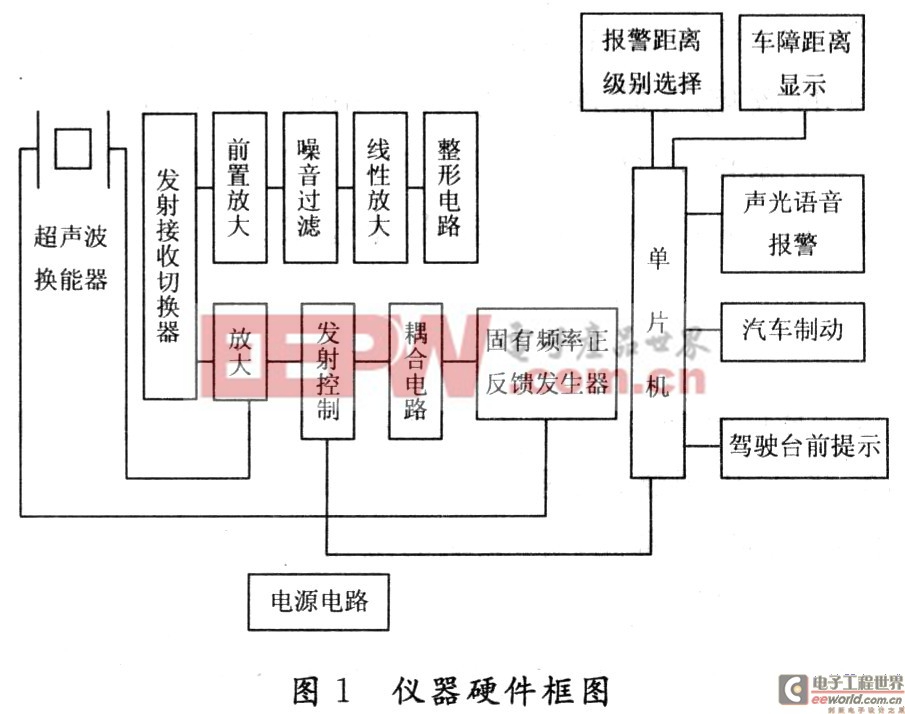
汽車防撞報警儀采用由AT89C52單片機為核心組成的微機系統,對儀器進行控制,其硬件系統如圖1所示。
1.3 工作原理
本防撞裝置利用聲波作為檢測波,利用超聲波作為機械波,其頻率為20 kHz~20 MHz。隨著頻率的增加,檢測距離減小,使用頻率在15~40 kHz之間,檢測距離為0.5~3.0 m,由發射器、接收器、控制器和反射板組成。發射器、接收器和控制器安裝在防撞主體(指由產品控制能實現防撞功能的汽車面板)上。發射器發出檢測波,經反射面反射給接收器,通過判斷處理后,發送控制器執行規定的功能。基于單片機的天車防撞系統采用AT89C52單片機和專用芯片測量超聲波發射到反射回所需的時間t,由S=vt(v=314 m/s,計算時加入溫度補償)得到從聲波發射到反射面的距離。此距離隨時顯示在汽車駕駛室內,軟件可以設置幾級提示和報警,當車障之間距離小于安全距離時,設置在駕駛室的聲光報警儀即發出聲光信號,通知駕駛員謹慎操作,從而有效地防止碰撞事故發生,保證人身及設備的安全。











評論