一種基于TI TMS320 DSP的軟件動態鏈接技術

摘要:介紹了軟件動態鏈接技術的概念和特點,提出了基于TI TMS320系列DSP的軟件動態鏈接技術。該技術解決了可重配置的DSP系統中關于軟件二進制目標代碼的動態加載和卸載的問題。采用該技術的軟件重配置方案已成功運用于某多功能通信系統,為基于其他系列DSP的可重構數字處理系統提供了一定的參考,在無人值守設備、多功能信號處理設備方面具有一定的應用價值。
關鍵詞:動態鏈接;TI TMS320 DSP;COFF文件;重定位
基于數字信號處理器(DSP)的多功能自適應通信系統在軟件無線電領域正變得日益普遍,如何使DSP系統在運行期間自適應的改變通信協議是實現這種系統的關鍵。當前,DSP開發人員采用了重配置、層疊(overlay)等技術來實現通信協議自適應功能,但作為運行時改變或擴展功能的最有效方式,基于DSP的動態鏈接技術尚未有文獻提及。
動態鏈接技術是相對于靜態鏈接而言,它是指編譯器在編譯程序時并不將程序所需的庫文件代碼復制到程序的可執行文件,而只是在程序中保留庫文件的調用標記。在程序運行時,由鏈接器將庫文件代碼加載到系統內存,并與程序鏈接為一個整體。在大多數DSP系統中,采用動態鏈接技術可以節省系統對片上存儲器大小的要求,此外,由于動態鏈接庫函數對外提供的是函數的接口,而不是函數的入口地址,因此動態鏈接函數可同時提供多個版本,使系統的升級變得更為方便。
通過研究和分析TI DSP目標代碼的生成過程和目標代碼的結構,提出了針對該系列DSP代碼動態鏈接的方法。將本文提出的方法應用到某通信系統中表明,該方法具有占用片上內存小、系統配置時間短、系統有較強的可擴展性等優點,在此后的DSP開發過程中會得到廣泛的應用。
1 DSP目標代碼生成流程
TI DSP系列開發工具包為開發人員提供了一套完整的軟件開發工具鏈,包括C/C++編譯器,匯編器,鏈接器等。利用這套開發工具包,DSP開發人員可以完成程序的編寫、編譯、鏈接,直到目標代碼的生成。其中,C/C++編譯器將C語言轉換為匯編語言,匯編器匯編語言翻譯為機器語言,以COFF目標文件的形式輸出給鏈接器。鏈接器將匯編器生成的COFF文件與庫文件鏈接成一個完整的程序,以可執行的COFF文件輸出到磁盤,生成DSP可執行程序。
2 DSP動態鏈接器的設計
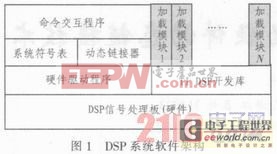
文中設計的DSP系統軟件架構如圖1所示。DSP應用程序被劃分為一個或多個可加載模塊,動態鏈接器作為DSP軟件系統架構中的一個重要的軟件模塊,其作用主要是在DSP系統改變功能時,按需將匯編器生成的目標文件按需加載到系統中,與系統已有程序結合成為一個整體,并將卸載系統中不需要的模塊。
2.1 模塊的定義
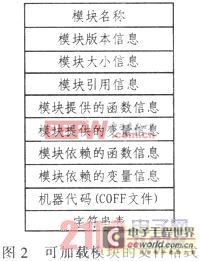
圖1中所示的可加載模塊文件主要包括DSP應用程序的機器代碼,此外包括模塊的名稱、大小、版本,模塊所包含的函數聲明,模塊所依賴的函數接口,模塊的入口函數信息,模塊被引用信息等。這些信息是在匯編器生成DSP應用程序的機器代碼后,由模塊生成程序將附加的信息添加到COFF文件中,生成最終的可加載模塊文件。本文設計的可加載模塊的文件格式如圖2所示。
2.2 模塊的加載和卸載
2.2.1 COFF文件格式
DSP動態鏈接器設計的關鍵是解析匯編器生成的目標文件,將目標文件中包含的代碼根據模塊的加載地址進行重定位后,完成與系統已有程序的鏈接。匯編器生成的目標文件是以COFF文件格式保存在磁盤上,其通常包括代碼段、數據段、用戶自定義段、符號表和重定位信息等數據,格式如圖3所示。
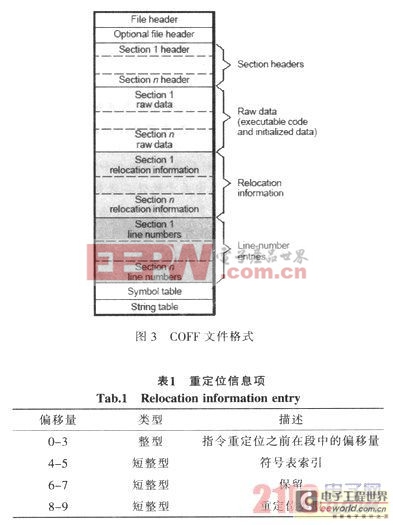
如圖3所示,COFF文件主要包括一個文件頭部和多個段信息,以及段重定位信息和符號表等。COFF文件缺省的包含3個段:. text段、.data段和.bss段。匯編器將匯編程序的代碼部分放到.text段中,將全局變量放在.data或.bss段中,同時在符號表中寫入該文件包含的符號(函數或變量)名稱和對外引用的符號名稱等信息。此外,每段的重定位信息表中都包含重定位信息項,根據重定位信息項,可以確定可重定位指令在段中的偏移量,表1給出了重定位信息項的結構。
重定位信息項的0—3字節表示可重定位指令以0作為起始地址,在當前段中的偏移量。4—5字節是符號索引表,它代表了該重定位指令索引的符號在COFF文件中符號表中的索引號。8—9字節表示重定位類型,它指出了如何將定位后的地址信息添加到該可重定位指令上。表2是重定位信息項的一個例子,這里假設該重定位信息項屬于.text段。
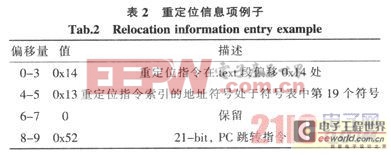
該重定位信息項說明在.text代碼段偏移20個字節處存在一條重定位語句,該語句所指向的符號在符號表中的位置是第20項(從0開始計),該語句的重定位類型是PC跳轉指令重定位。
2.2.2 DSP機器代碼的識別
匯編器生成的是DSP機器代碼,因此動態鏈接器需要分析重定位指令格式,以便將指令引用地址添加到該指令中。根據TMS320 DSP指令手冊,TMS320 DSP指令格式包括如圖4所示。
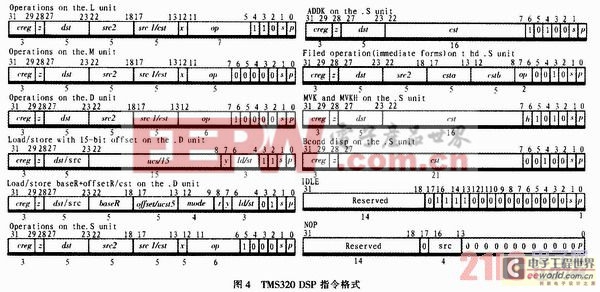
文中通過分析指令格式的低位比特位,可以判斷出指令屬于上述指令中的哪一類。以指令0x0200007E為例,將指令表示為二進制:(0000 0010 0000 0000 0000 0000 0111 1110)b,指令的2~3位為11,在圖4中查找2~3位為11的指令,可以發現該指令是一條STW存儲指令,指令的ucst15比特域表示了其需要重定位的地址。
2.2.3 模塊動態鏈接的實現
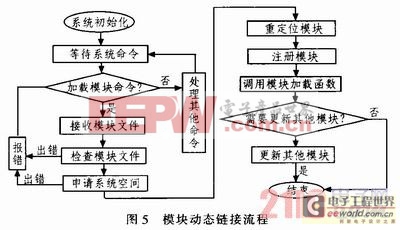
動態鏈接器的功能主要包括模塊的動態鏈接和動態卸載,模塊動態鏈接的主要流程如圖5所示。動態鏈接器在收到加載模塊請求時,首先檢查模塊文件的完整性,并根據加載模塊的依賴信息在系統符號表中查找對應的函數和變量。當模塊通過完整性和依賴性檢查后,動態鏈接器首先根據模塊大小聲明,在系統的存儲空間中分配空間,將模塊文件加載到系統存儲空間。接著動態鏈接器根據COFF文件信息,搜索COFF文件代碼段中的重定位語句,并根據指令格式確定指令中地址域信息,最后將綜合模塊被加載的地址和指令索引的符號的地址,計算地址信息,并將此信息填入可重定位指令的地址域,完成指令的重定位。在代碼段重定位完成后,動態鏈接器將模塊名稱、模塊對外提供的函數名稱、模塊入口地址等信息注冊到系統符號表中,并調用模塊加載函數,完成模塊對系統資源的申請。最后,如果該模塊所提供的函數或者變量替換了系統已有的函數或者變量,動態鏈接器還需要將所有引用該函數或變量的其他模塊進行重定位,以反映系統狀態的更新。
2.2.4 模塊動態卸載的實現
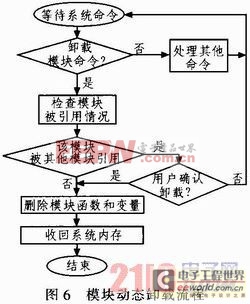
模塊動態卸載是加載過程的逆過程,動態鏈接器在收到卸載模塊請求時,首先在系統中搜索是否有模塊引用了將要被卸載的模塊,若存在則警告用戶,并等待用戶確實是否強制卸載。若是,動態鏈接器將卸載模塊對外提供的函數和變量從系統符號表中刪除,并收回卸載模塊占用的系統空間。完整的模塊動態卸載流程如圖6所示。
3 結論
文中設計的DSP動態鏈接器為傳統的DSP系統帶來新的應用功能,已在某多功能通信系統中獲得了成功的應用。動態鏈接技術作為DSP系統的重配置技術之一,其應用要比傳統的DSP全系統重構技術或疊加技術更為靈活和高效。同時,本文提出的動態鏈接技術相對于文獻,文獻提出的函數查找表的實現方式更加富有效率。盡管目前動態鏈接技術在DSP領域的應用很少,但隨著DSP應用向多功能發展,相信動態鏈接技術在DSP領域的應用會越來越廣泛。










評論