基于DSP 的電動汽車CAN 總線通訊技術設計

德國Bosch公司為了解決現代車輛中眾多的控制和數據交換問題,開發出一種CAN(Controller AreaNetwork) 現場總線通訊結構. CAN總線硬件連接簡單,有良好的可靠性、實時性和性能價格比. CAN總線能夠滿足現代自動化通訊的需要,已成為工業數據總線通訊領域中最為活要躍的一支.
其主要特點是: ①CAN總線為多主站總線,各節點均可在任意時刻主動向網絡上的其它節點發送信息,不分主從,通信靈活; ②CAN總線采用獨特的非破壞性總線仲裁技術,優先級高的節點優先傳送數據,能滿足實時性要求; ③CAN總線具有點對點,一點對多點及全局廣播傳送數據的功能; ④CAN總線上每幀有效字節數最多為8個,并有CRC及其它校驗措施,數據出錯率極低,萬一某一節點出現嚴重錯誤,可自動脫離總線,總線上的其它操作不受影響; ⑤CAN總線只有兩根導線,系統擴充時,可直接將新節點掛在總線上即可,因此走線少,系統擴充容易,改型靈活; ⑥CAN總線傳輸速度快,在傳輸距離小于40m時,最大傳輸速率可達1Mb/s. 正是由于CAN總線具有這些其它通信方式無法比擬的優點,使之成為電動汽車控制系統的理想總線.
1 電動汽車對通訊網絡的需求
電動汽車由于儲能設備容量有限,在運行過程中對能源的管理十分嚴格. 效率是衡量電動汽車系統性能的重要指標,國家863“十五”電動汽車重大專項要求電動機系統額定效率為85% ,控制器的額定效率達到95%. 電動汽車電子控制系統的動態信息必須具有實時性,各子系統需要將車輛的公共數據實時共享,如電機轉速、車輪轉換、油門踏板位置和剎車踏板位置等. 但不同控制單元的控制周期不同,數據轉換速度、各控制命令優先級也不同,因此需要一種具有優先權競爭模式的數據交換網絡,并且本身具有極高的通信速率. 此外,作為一種載人交通工具,電動汽車必須具有較好的舒適性,整車通訊系統必須具有很強的容錯能力和快速處理能力.
目前,電動汽車的發展得到了各國的高度重視.電動汽車成為未來汽車發展的主流方向. 電動汽車內電氣元件極多,需要實時傳輸和共享的數據很多.如何提高電動汽車通訊的實時性、可靠性和應急處理能力成為電動汽車通訊的難點所在. 我們采用TMS320LF2407型DS作為電動汽車通訊系統的主處理器,利用DSP良好的快速處理能力提高數據處理速度,從而提高通訊的實時性;利用DSP內嵌的CAN總線模塊作為CAN的控制器,減少硬件電路的復雜性,從而提高通訊的可靠性;通過軟件設計緊急時刻屏蔽次要因素來提高電動汽車的應急處理能力.
2 控制方案
電動汽車總成控制我們采用先進的模糊控制,采用的控制器也是TMS320LF2407型的DSP. 對采集到的剎車信號,加速信號和反饋回的轉速信號進行模糊處理,得到期望的轉速信號,并將得到的轉速值通過CAN 總線傳送到電動機的控制機構,對電動機進行控制,滿足駕駛員的駕駛意圖. 同時管理燈光系統和屏幕顯示系統. 屏幕顯示系統實時顯示電動汽車的運行狀態. 具體控制方案如圖1 所示.
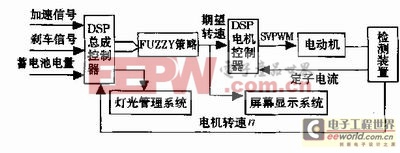
圖1 電動汽車控制系統結構框圖
3 電動汽車CAN總線通訊方案
電動汽車控制需要良好的通訊協調性和運行可靠性. 良好的通訊系統是實現電動汽車可靠運行的關鍵. CAN總線結構是一種有效支持分布式控制或實時控制的串行通訊網絡. 圖2 是一個典型的電動汽車CAN總線結構示意圖,包括整車動力部分的主電動機控制器、電池組管理系統、電動汽車屏幕顯示系統等多個設備,這些子系統之間通過CAN進行數據通訊和命令傳輸. 每個節點設備都能夠在脫離CAN 總線的情況下獨立完成自身系統的運行,從而滿足車輛運行安全性的需要. 同時,CAN總線也不會因為某個設備的脫離而出現系統結構崩潰的現象.
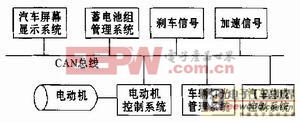
圖2 電動汽車CAN 總線結構圖








評論