基于CAN總線的潛水電機智能監控系統設計

目前,國內外已有多家公司開發出針對個體潛水電機的智能電了保護裝置,雖然可以達到保護電機的目的,但無法實現集中管理。因此,對潛水電機群的實時監控與統一管理的要求日益迫切。本文設計了基于CAN現場總線的潛水電機群分布式智能監控系統,可以對散布的潛水電機保護裝置進行組網,實現潛水電機的智能化控制和網絡化管理。
潛水電機智能監控系統總體方案設計
基于CAN現場總線的潛水電機分布式智能監控系統由監控計算機(內置PC-CAN適配卡)、智能節點、CAN總線網絡組成,其系統的總體結構如圖1所示。分布在現場的監控節點可以獨立對電機進行智能控制和故障保護;監控計算機可以通過CAN總線網絡和各個監控節點進行實時通信,從而實現潛水電機群的分布式控制和集中臨管。
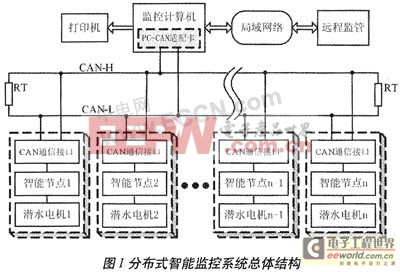
智能節點是整個監控系統的核心部分,它對潛水電機進行智能控制,并對電機在運行過程中出現的過載、過熱、滲水、漏水、短路、缺相等故障進行保護。PC-CAN適配卡用來完成CAN總線和監控計算機之間的協議轉換,可以選用PCI總線適配卡、ISA總線適配卡或RS-232串行通信適配器。各個智能節點之間通過屏蔽雙絞線瓦聯構成CAN總線網絡,總線兩端連接120Ω的阻抗匹配電阻,可以提高系統的穩定性和抗干擾能力。
監控系統的硬件設計
由監控系統的整體結構和功能可知,該系統的硬件設計主要足CAN智能節點的設計。智能節點硬件電路設計采用了模塊化結構,由MCU、CAN通信模塊、信號采集模塊、電機控制模塊、狀態顯示模塊、參數設置模塊及串行通信接口組成,智能節點的整體結構如圖2所示。根據具體情況可以只選用其中的部分模塊,增加了監控裝置的實用性和經濟性。例如:可以去掉顯示模塊和現場設置模塊,利用監控計算機實現數據顯示和參數設置的功能。在單機運行時,可以不使用CAN通信模塊。
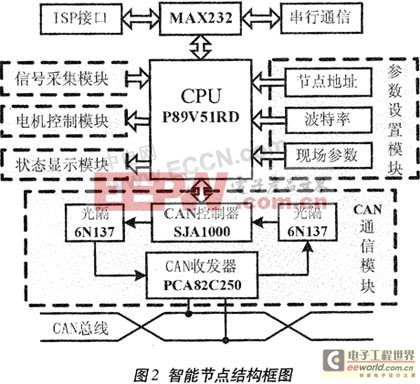
為了簡化設計,提高系統的可靠性和性價比,智能節點的主要元器件都是選用同一家公司的產品,包括:微控制器(P89V51RD)、CAN控制器(SJA1000)、CAN收發器(PCA82C250)。P89V51RD內帶64kB的Flash存儲器,該存儲器支持ISP功能,ISP的優點是支持在系統編程,即不需要移出為控制器,只需要通過串行接口(RXT和RXD),結合上位機軟件就可以實現PC對MCU的重復編程,而且硬件電路連接簡單,這樣就方便了程序調試,縮短了設計開發周期,提高了系統的穩定性。現場智能節點各個組成模塊的功能如下:
1.CAN通信模塊:CAN總線通信接口電路主要由CAN控制器SJA1000、6N137高速光隔、CAN收發器PCA82C250組成。SJA1000完全兼容CAN2.0協議,用來完成物理層和數據鏈路層的功能,可實現對通信數據的成幀處理,具有多主結構、總線訪問優先權、硬件濾波等特點;PCA82C250提供了對CAN總線差動發送和接收數據的功能,有效地提高了總線的抗干擾能力,實現了保護總線、降低射頻干擾等功能。為了進一步提高整個系統的可靠性和穩定性,在SJA1000和PCA82C250之間增加了光電隔離器件,并且采用了雙電源,有效地抑制由總線引入的干擾。













評論