汽車變速箱自動涂膠系統的設計

0 前言
隨著汽車制造業的飛速發展,汽車各部件的密封問題已成為汽車制造業不斷改進的問題之一,亦是提高產品質量贏得消費者的關鍵。以往采取各種密封墊來解決該問題,但隨著涂膠技術在國內的廣泛應用,在內燃機油底殼的結合面、汽車發動機缸體的油底殼和齒輪蓋結合處,用密封膠代替了以往常用的密封件墊圈,實現了“以膠代墊”。但現今存在的涂膠技術多數是采用手工涂膠,手工涂膠雖然操作簡單,卻存在涂膠不均勻及效率低的現象,影響了密封效果。若采用自動涂膠,不但涂膠均勻,保證了質量,而且大大提高了生產效率。
汽車變速箱的結合面形狀復雜,結合面寬度較小,生產節奏快,多涂密封膠會造成浪費,膠線過細涂膠不足會造成密封不好,發生泄漏。且不同材質、不同氣候環境也會影響施膠工藝。因此,設計精確的工藝方案以及自動化的涂膠設備,可以有效杜絕泄漏,降低生產成本,提高產品質量。
機器人系統在當今汽車制造和復雜的機械系統中有著廣泛的應用。本文實現了機器人在汽車變速箱密封蓋自動涂膠應用系統的設計。系統包括控制系統、涂膠系統、操作系統以及安全保護系統。
1 涂膠系統原理設計
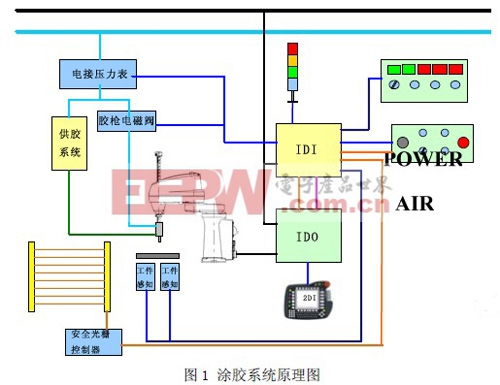
本系統主要實現汽車變速箱的自動涂膠工作流程,其原理如圖1 所示,主要包括機械系統、電氣系統、供膠系統及安全設置。機械系統主要實現機器人底座和變速箱蓋的定位設計,電氣系統主要實現機器人控制系統及主控制系統的控制,供膠系統主要由氣壓系統控制供膠泵實現自動供膠,最后考慮到系統的安全性設置了安全光柵等保護環節。
2 機器人涂膠工作站
依據該系統的設計原理實現了機器人涂膠系統工作站的設計。本工作站包括機器人系統、工作流程線、供膠系統以及安全光柵。此外,機器人控制柜用于實現對機器人的實時控制,主控制柜實現整個涂膠工作站的控制。工作站設計如圖2 所示。在設計過程中主要考慮以下幾個問題。
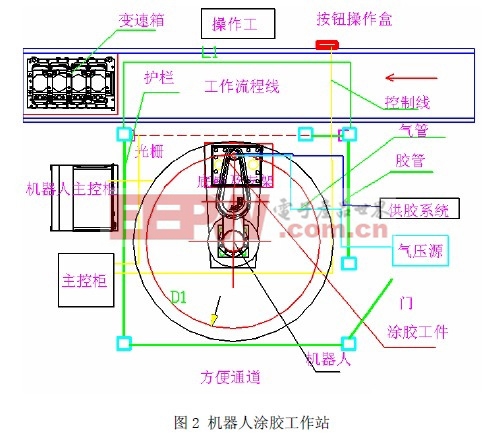
① 由于汽車變速箱密封蓋結合面比較復雜,因此涂膠軌跡執行機構必須具有6 個自由度。本系統采用瑞士ABB 公司生產的IRB2400/16 型機器人, 機器人持重10kg, 涂膠嘴固定于機器人執行末端對密封蓋進行自動涂膠。根據機器人的實際數據設計機器人底座以滿足涂膠系統運轉方便自如。連接機器人的機械部分是底板、焊接連接鋼、底座焊接鋼等。
② 精確的定位系統提高了工作站的工作效率。本系統設計了自動定位系統。工件定位裝置采用兩個定位銷和兩個支撐銷來給涂膠工件定位。定位工件的下方裝有接近開關,若工件安裝沒有達到安裝要求,接近開關不會給系統信號,整個機器人系統則不能夠運行。定位裝置主要由定位銷、支撐銷、定位支撐板、支撐板焊接鋼幾部分組成。定位裝置要滿足工件的工藝所要求的精確度,上下取方便。
③ 為提高系統的安全性設置安全護欄。根據機器人的工作范圍,安全光柵要求與機器人運行時不發生干涉,護欄的設計高度為1.5 米,安全護欄周圍加一個門,方便操作。
電容式接近開關相關文章:電容式接近開關原理
評論