基于Verilog HDL語言的CAN總線控制器設計及驗證

0 引言
CAN(Controller Area Network)是由ISO定義的一種串行通信總線,它是一種能有效地支持高安全等級的分布實時控制的新一代網絡通信協議,屬于現場總線范疇。CAN最早被設計作為汽車環境中微控制器的通訊,在車載各電子控制裝置與ECU之間交換信息,形成汽車電子控制網絡,目前應用領域已經相當廣泛。
近年來,支持CAN協議的芯片不斷推出,給CAN總線用戶帶來了極大的方便。隨著我國對現場總線技術需求的增加,CAN總線已經會成為我國最常用的現場總線之一。
基于CAN總線的ECU電子控制單元的開發,也是現在最熱門的研究。現在對CAN總線芯片的研究已經不再局限于單一芯片的研究,而是把所有的功能芯片都集中在一塊芯片上實現一個完整的ECU的功能。
本項目目的是利用FPGA實現一款支持CAN2.0協議的總線控制器,完成一個通用的能夠滿足CAN2.0協議的CAN總線控制器軟IP核,這樣可以在以后的應用中方便的集成到其他系統中去。本文使用VerilogHDL語言,設計了一款支持CAN2.0協議的CAN總線控制器,并利用FPGA芯片在CAN總線網絡中對其進行了測試,實現了設計目的。創新點為CAN_Registers設計中寄存器模塊、位流處理器的收發部分功能、測試程序、基于該FPGA的CAN總線控制器的節點電路等。
1 CAN總線控制器設計
1.1 CAN控制器設計流程
1.1.1 功能設計
首先對CAN2.0協議進行了深入的分析,掌握了CAN總線協議的各部分內容;而后參照和分析了幾種典型的CAN總線控制器的功能;最后選擇PHILPS公司生產的CAN總線控制器SJA1000進行進一步的分析,掌握了它的各部分模塊的功能。在這些基礎上根據需要規劃了所設計的CAN總線控制器的功能。
1.1.2 設計描述和功能驗證
功能設計完成后,依據功能并參照CAN總線2.0協議,將控制器劃分為若干功能模塊,明確了各個功能模塊的作用。確定模塊及其功能之后,用Verilog HDL語言實現了各模塊的設計。接著,利用Modelsim對整個設計進行了功能驗證。
1.1.3 邏輯綜合
功能仿真通過以后,利用QuartusⅡ對所設計的CAN總線控制器進行邏輯綜合,并把其配置到FPGA中。
1.1.4 硬件驗證
配置到FPGA中以后,用所設計的基于FPGA的CAN總線控制器作為一個節點,與采用SJA1000作為控制器的節點電路進行了通信測試,驗證了所設計的CAN總線控制器的功能。
1.2 CAN總線控制器的整體設計
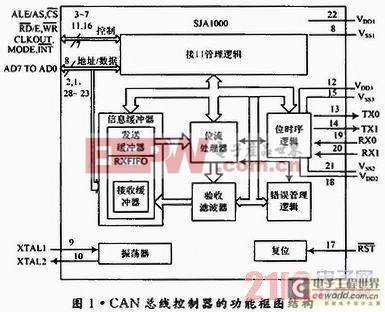
1.2.1 控制器SJA1000的功能結構
SJA1000是PHILIPS公司于1997年推出的一種獨立CAN總線控制器,用于汽車和一般環境中的控制器局域網絡。SJA1000主要由以下幾個部分構成:接口管理邏輯、發送緩沖器、接收緩沖器、接收濾波器、位數據流處理器、位時序邏輯、錯誤管理邏。SJA1000是雙列直插式集成電路,功能框圖如圖1所示。
1.2.2 本文中控制器的功能結構
本文設計的CAN控制器參照SJA1000控制器的結構,功能基本框架包含如圖2所示的3個功能模塊。
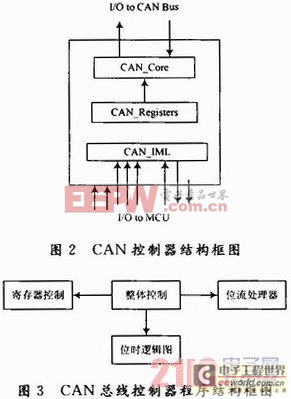
CAN_IML是CAN總線控制器接口邏輯,主要功能是解釋來自微處理器的命令,控制CAN寄存器的尋址,向微處理器提供中斷信息和狀態信息。









評論