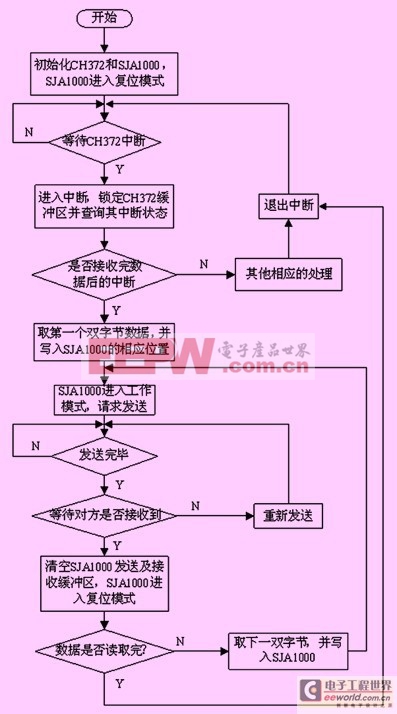
基于CAN總線的步進電機多機控制系統的設計 作者: 時間:2012-08-10 來源:網絡 加入技術交流群 掃碼加入和技術大咖面對面交流海量資料庫查詢 收藏 <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 圖4 usb-can模塊流程 圖5 can節點模塊流程 5 結束語 can現場總線具有通信距離遠、傳輸速度快的特點,該系統可實現對電機的全集成數字控制。基于步進電機行程的可控性,本系統可實現對運動對象的精確位置控制。此外,可以在can節點模塊上多加幾路限位等機械急停按鈕,使電機更加安全、可靠的運行。 上一頁 1 2 3 下一頁












評論