車載網絡系統及CAN協議的應用分析

1.1 汽車電子技術的發展提出了網絡化的要求
現代社會對汽車各方面的要求不斷提高,這些要求包括:極高的主動安全性和被動安全性;乘坐的舒適性;駕駛與使用的便捷和人性化;尤其是低排放和低油耗的要求等。在汽車設計中運用計算機微處理器及其電控技術是滿足這些要求的最好方法,而且已經得到了廣泛的運用。目前這些系統有:ABS(防抱系統)、EMS(發動機管理系統)、多功能數字化儀表、主動懸架、導航系統、電子防盜系統、自動空調和自動CD 機等。這些系統由多個電控單元相互連接而成,可分為控制器、傳感器、執行器等。同時各個系統之間也互相連接,進行著越來越多的數據交換。這樣就需要使用大量的線束和插接器來實現互連,進行它們之間的數據交換。隨著汽車電子技術的不斷發展,這種需求的增長是驚人的。圖1 給出了它的增長情況。

圖1
1.2 車載網絡系統的應用要求
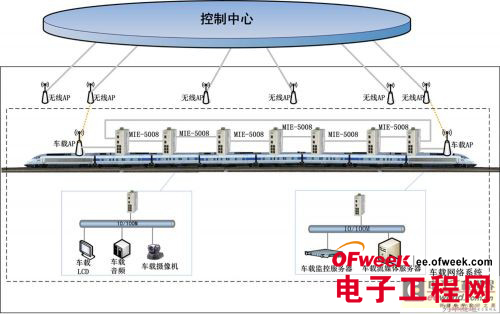
車載網絡系統的建立可參考現有的局域網絡系統,但又有較大的不同,尤其是使用環境不同于一般局域網,其要求更加苛刻。一般汽車內(主要是機艙內):溫度變化大,可達-45℃~100℃;汽車在行駛中可能出現較大的振動;點火噴射系統等的裝置也會帶來較大的電磁干擾;同時對一些電控系統如EMS、ABS 等的信息傳遞要求迅速及時。另外由于涉及安全性的考慮,要求網絡系統有很好的可靠性。
這就要求網絡除了采用總線拓撲結構方式外,必須具有極好的抗干擾能力;系統自身的健壯性;極強的差錯檢測和處理能力;信息傳輸實時性要求;同時具備故障的診斷和處理能力等。另外考慮到成本因素,要求其控制接口結構簡單,易于配置。
1.3 車載網絡的發展現狀
眾多的國際知名公司早在20 世紀80 年代就積極致力于汽車網絡技術的研究及應用。到目前為止已形成了多種網絡標準,如:SAE(汽車工程師協會)的J1850 和J1939、德國大眾的ABUS、法國PSA 的VAN、美國商用機器的AutoCAN、德國BOSCH的CAN 等等。
近幾年,在歐洲和美國推出的車型基本上都配備了一個、兩個甚至多個網絡系統,不光高檔車裝備有,甚至低檔經濟型車也有。日本的汽車公司也開始逐步使用車載網絡系統。
我國近一兩年和歐洲同步推出的幾款車型也裝備了汽車網絡系統,如:神龍汽車有限公司去年推出的“畢加索”轎車裝備了VAN 網、明年即將推出的“薩拉”N7 轎車將裝備VAN 和CAN 混合網、后年推出的“標致307”系列車將采用FullCAN 網系統;一汽大眾的“寶來”轎車在動力系統和舒適系統中裝備了兩套速率不同的CAN 網;上海大眾的“波羅”也裝備了CAN 網。
正如一些汽車專家認為的:就像汽車電子技術在上世紀70 年代引入集成電路、80 年代引入微處理器一樣,近十年來車載網絡技術的引入也將是汽車電子技術發展的一個里程碑。
2 CAN 網逐漸發展成為車載網絡領域中應用最為廣泛的國際標準
2.1 CAN 網絡協議的產生和發展
1986 年2 月,Robert Bosch 公司在SAE 年會上介紹了一種新型的串行總線系統—CAN(Controller Area Network)。根據這個CAN 協議,在1987 年中期,Intel 開發了首個CAN 控制器—82526。不久,Philips半導體也推出了82C200。這兩種CAN 控制器在報文過濾和控制上有許多的不同。Philips 半導體的方式叫BasicCAN;Intel 的方式叫FullCAN,由此后的不斷發展,從而形成了FullCAN 和BasicCAN 兩大陣營。
在20 世紀90 年代初,Bosch CAN 規范(CAN 2.0)被提交給了國際標準化組織。經過討論,應一些法國主要汽車商的要求,包含了吸收一些VAN 網(Vehicle Area Network)的內容。并于1993 年11 月出版了正式的CAN 國際標準ISO11898。從此CAN 協議被廣泛的用于各類自動化控制領域。在1992 年,奔馳公司首先在他們的高級轎車上使用了CAN 技術。這是CAN 技術在車載網絡系統中的首次實際使用。








評論