智能伺服驅動濾除機械共振

產品切換更快更簡單,僅僅按一下按鈕就能夠改變電機速度和更換凸輪類型,無需對齒輪配比或者機械凸輪進行物理更換。而且,復位和拉力的過程控制可以通過手動方式直接更改伺服驅動器的位置或者速度命令值,無需補償器或者其他輔助硬件來影響設備運動。
但是和齒輪組不同,伺服電機通常需要調整才能獲得最優的性能并克服機械共振問題。在位置控制回路中,編程位置與實際位置進行對比,差值乘以一個系數(增益)作為速度回路的命令,速度回路的輸出作為電流回路的命令,這個最終回路的輸出顯示了方向和電流的大小,而這些輸出同時由伺服驅動器傳送給電機繞組。
所有三個控制回路都具有多種類型的“增益”,調整就是對這些增益進行調整以使實際的運動盡可能接近于預期運動的過程。在實際操作中,這種工作方式使顏色不會失真,打印照片清晰,或者在沖切過程中能夠保證進紙速度精確匹配,不會發生撕紙和卡紙現象。更高的增益通常意味著更高的帶寬(響應),但是過高的增益會導致超限和不穩定。
機械共振
理論上,理想的控制回路增益與負載特性(慣性負載、剛性負載)相關,因此也可以計算出預期響應。但是某些因素對這些增益值會產生影響,使應用無法獲得預期的帶寬。例如,如果控制回路的采樣頻率過低,那么輸出就永遠都無法穩定到一個恒定值。但是相比之下,更加具有挑戰的問題是機械共振。
機械共振由機械系統的固有頻率激發產生。固有頻率指在最小的振動或者鳴響發生時的頻率,它是機械系統的固有特性,耦合器、軸承、齒輪和機械框架都會影響這個頻率。共振能夠縮短機械驅動(線性傳動)設備的壽命和產品質量,而且在某一個特定設備速度下,這種效果尤為明顯,此速度與固有頻率相關。在分布式伺服驅動設備中,如果控制回路根據反饋做出動作,而反饋涉及到與固有頻率相關的多個重要部件時,這種效果會被進一步激發。如果在這個頻率上已經有了一個放大器,加上控制回路的增益,那么就很容易造成共振,其結果是過高的振動和不穩定性。最輕微的結果就是產品質量將受到考驗,設備部件磨損加劇,更快失效。最嚴重的結果就是即使沒有電機過熱或者頻率突變,設備也會停止工作。
固有頻率
如果共振確實帶來了問題,那么可以使用加速度計來收集振動數據,使用相關軟件分析這些數據并找到設備或者設備的子構件的固有頻率。可以采取一些修改方案,例如增加一些支撐梁以提升設備結構的剛度,或者使用更高等級的耦合器或者軸承,目的就是改變設備的固有頻率,使其不在設備的工作頻率區間之內。這些機械朝向的診斷方法和糾正方法需要特殊工具和專業技能,還會帶來額外的工程成本。而采用“邊試邊找”的方法來制定更改方案又頗為耗時,而且時常無功而返。
如果從控制端來解決這個問題,可以采用降低伺服驅動器速度回路增益的方法。仔細研究速度回路能夠發現共振在速度反饋中的明顯作用,它會被速度回路放大。在某些情況下,只需要將速度回路增益稍稍降低就能夠將共振削減至可以接收的程度,避免不穩定狀態的發生,同時還能夠為電機控制提供足夠的控制幅度,滿足應用的需求。
對于其他一些情況,只有將增益大幅下降才能夠有效控制問題的產生,而此時伺服性能也明顯地大打折扣。這可能意味著打印滾筒具有較高的位置偏差——導致對于不同的圖片,打印復位的容差可能超限(有些圖片效果尚可,有些就有點模糊)。或者輥軸對速度控制不夠,導致快慢不一,圖像質量下降,圖像被拉伸或者壓縮,甚至會對輥軸造成損傷。
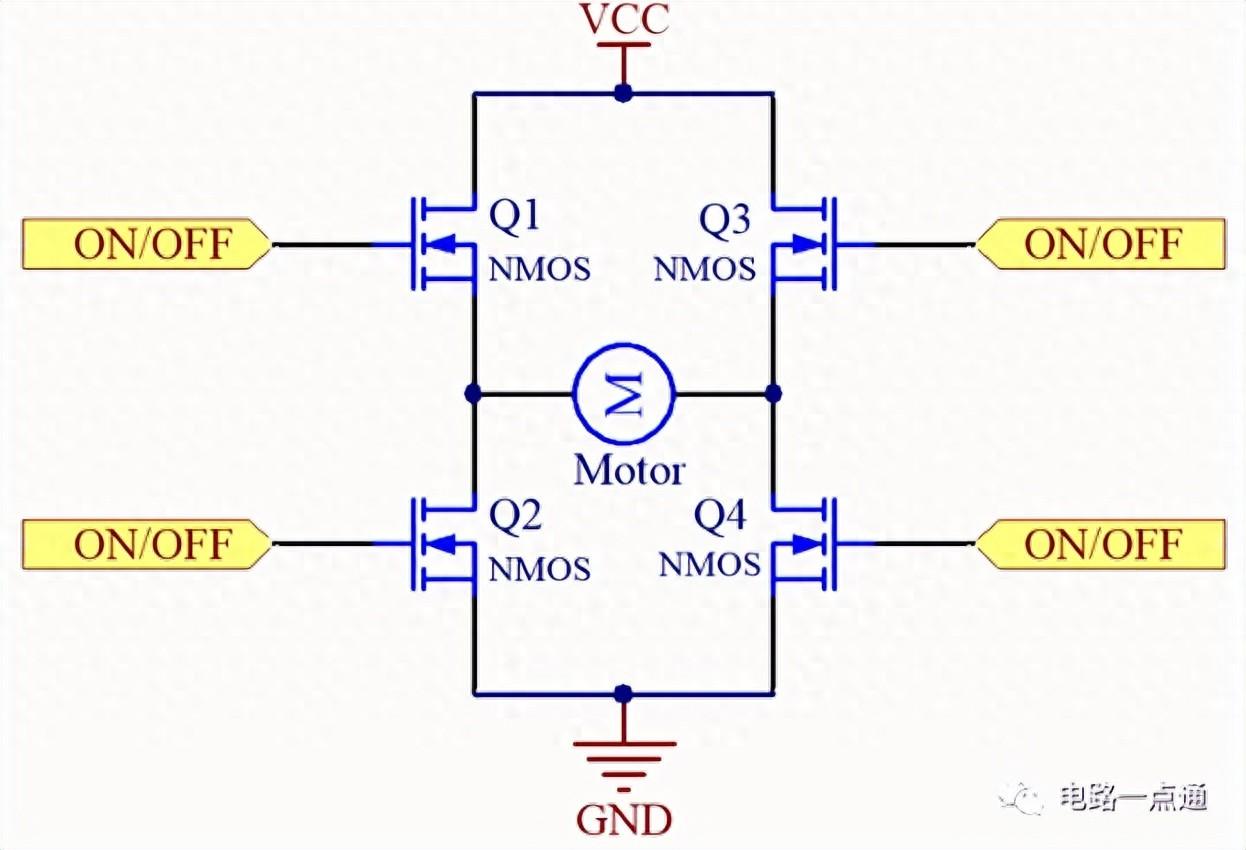
有了智能伺服驅動器,就能克服共振的影響,且不會對性能造成影響,也無需額外的資源。可以用變頻驅動來控制同步交流電機,在電機轉軸上連接一個慣性飛輪用來模擬負載,飛輪設置成輕微的不平衡,然后僅僅使用一個螺釘穿過飛輪,并使用一個螺孔固定在電機轉軸上,不使用耦合設備對振動進行抑制或者對失衡進行補償。
電機開始啟動時,會發出“蜂鳴”般的振動,說明這種簡單機械系統存在某種不穩定性,將速度回路增益的默認值升高,蜂鳴聲就會更大。蜂鳴聲不僅僅是令人討厭那么簡單,它告訴我們電機正處在完全失控的邊緣——導致位置錯誤或者速度回路故障。降低增益能夠削減振動,但是電機性能也隨之降低,對于一些柔性版印刷設備來說,高標準的印刷作業復位容差不超過0.002英寸,所以這種結果是不能接受的。圖1所示為使用默認增益在500轉/分鐘的速度運轉時的位置偏移,此時能夠觀察到0.065度峰間值誤差,對于24英寸的圓形輥軸,其表面的誤差換算過來就是0.0043英寸。在克服振動影響之后,提升增益能夠獲得更好的結果。
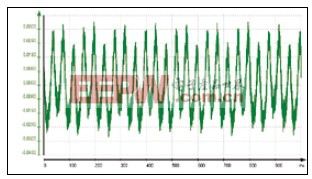
圖1 振蕩圖顯示了機械系統的不穩定性。
第一步就是通過進行“白噪聲”測試來找到振動頻率。使用Rexroth公司的集成驅動指令值生成器(圖2),可以在電機的扭矩指令輸入信號中施加一個噪聲信號。使用預先指定的放大倍率,指令值生成器會以隨機的頻率輸出正向和反向扭矩,因此電機將會發生振動,產生類似于TV或無線電的白噪聲。不使用錘子或者棍棒敲擊,電機就能在較寬的頻率區間上對機械結構產生“沖擊”,我們可以藉此來觀察在哪些頻率的沖擊下響應要高于其他沖擊頻率。
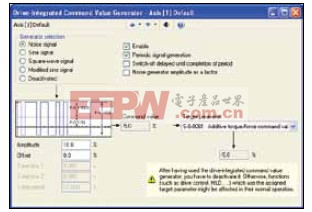
圖2 白噪聲測試能夠發現共振頻率。使用Rexroth公司的集成驅動指令值生成器, 將噪聲信號施
加到電機的扭矩指令輸入上。圖像來源:BoschRexroth 公司。

伺服電機相關文章:伺服電機工作原理










評論