基于Lonworks總線的智能數據采集系統

4 系統的硬件結構
本文采用現場總線作為系統的通信平臺,構建一個開放的,具有互操作性的實時現場總線數據采集系統。實現該測控系統的具體方案如下:
考慮到系統降低成本的要求,結合現有總線控制系統的特點,作者利用現場測控設備、Lonworks節點和其網絡設備組成現場測控網絡。在此,我們只要在設計每個Agent的時候,給每個模塊加上Neuron芯片,通信線路只需普通的雙絞線即可,這樣便可以實現各Agent之間的任意通信。同時以單片機系統作為硬件支撐,用MCS51語言作為軟件開發工具,使其與新型傳感器和執行機構構成相應的智能Agent。主要完成對測控對象的基本控制,通過臨時的現場節點采集所需要的監控信息,進行感知處理,并通過總線傳到管理Agent進行總體數據分析、處理和故障診斷。動態節點Agent之間遵循Lontalk協議,采用網絡變量實現各節點的連接。節點間的數據通信采用窗口協議以顯示報文進行數據傳輸,并通過網絡變量來管理,這樣就實現了節點Agent間的相互操作,并采用類KQML的通訊模式實現Agent間的信息和知識的共享。
4.1控制Agent
控制Agent的主要功能是完成自身的控制算法,并根據任務需要與其它Agent組成動態的多Agent合作系統。控制Agent所需要的控制命令和數據均通過Lon總線傳輸。控制Agent只帶有Lonworks接口芯片和外部擴展EZPROM,并無任何其它外設。
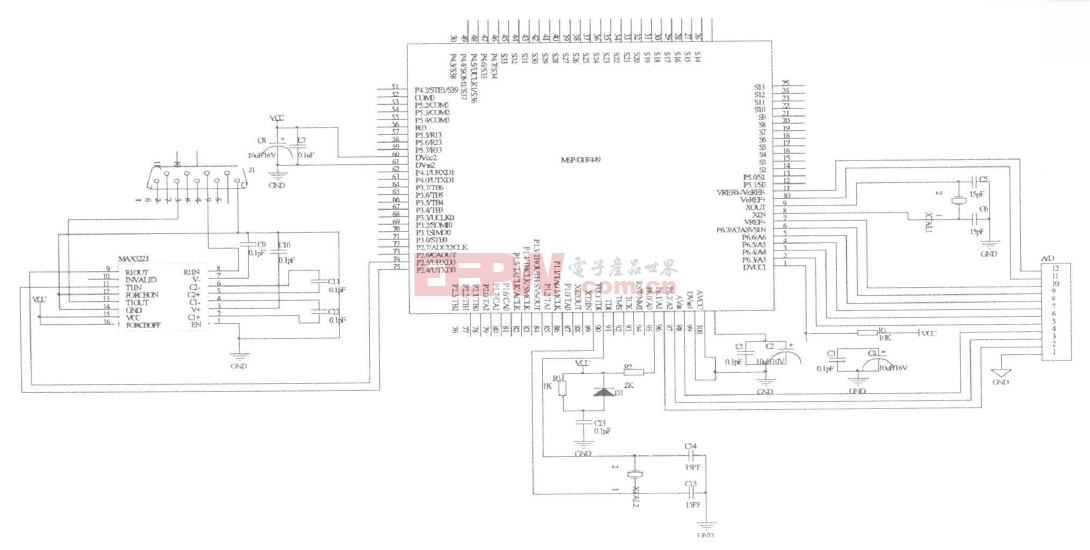
本文采用神經元芯片TMP3150與AT89c51單片機連接構成Lon總線接口電路,二者之間采用并行通訊方式。單片機AT89c51的P0口與3150的IO0~IO7,相連作為8位的數據總線;AT89c51的P3.2與3150的IO8相連,作為單片機請求發送數據的信號線和接收3150控制命令的應答線;P3.3與IO9相連,作為神經元芯片接收數據的應答信號線;P3.4與I010。相連,用作3150發送控制命令的信號線。這樣選取P3.2和P3.3。作握手信號,保證了單片機與3150的嚴格同步。同時,為了避免系統受到干擾時死機,在單片機每次等待應答信號時都加入了一個延時。若延時結束還未收到應答信號,那么單片機就跳到初始狀態。該Agent的電路原理如圖3所示:

圖3 控制原理圖


評論