電動助力轉向系統電機驅動電路的設計

電動助力轉向系統(EPS,Electric Power Steering)是未來轉向系統的發展方向。該系統由電動機直接提供轉向助力,具有調整簡單、裝置靈活以及無論在何種工況下都能提供轉向助力的特點。EPS最為突出的是該系統可在不更換系統硬件的情況下,通過改變控制器軟件的設計,十分方便地調節系統的助力特性,使汽車能在不同車速下獲得不同的助力特性,以滿足不同工況下駕駛員對路感的要求。
電動助力轉向系統(EPS)主要包括傳感器、控制器和執行器三大部件。傳感器將采集到的信號經過相應處理后輸人到控制器,控制器運行內部控制算法,向執行器發出指令,控制執行器的動作,系統結構如圖1所示。其工作原理為:在操縱方向盤時,轉矩傳感器根據輸人轉向力矩的大小,產生出相應的電壓信號,由此電動式動力系統就可以檢測出操縱力的大小,同時,根據車速傳感器產生的脈沖信號又可測出車速,再控制電動機的電流,形成適當的轉向助力。

(一)微控制器的選擇
MOTOROLA公司的MC9S12系列單片機是基于16位HCS12 CPU及0.5μm制造工藝的高速、高性能5.0V FLASH微控制器,是根據當前汽車的要求設計出來的一個系列[l]。它使用了鎖相環技術或內部倍頻技術,使內部總線速度大大高于時鐘產生器的頻率,在同樣速度下所使用的時鐘頻率較同類單片機低很多,因而高頻噪聲低,抗干擾能力強,更適合于汽車內部惡劣的環境。設計方案采用MC9S12DP256單片機,其主頻高達25 MHz,同時片上還集成了許多標準模塊,包括2個異步串行通信口SCI,3個同步串行通信口SPI,8通道輸人捕捉/輸出比較定時器、2個10位8通道A/D轉換模塊、1個8通道脈寬調制模塊、49個獨立數字I/0口(其中20個具有外部中斷及喚醒功能)、兼容CAN2.OA/B協議的5個CAN模塊以及一個內部IC總線模塊;片內擁有256 KB的Flash EEPROM,12KB的RAM及4KB的EEPROM,資源十分豐富。
(二)硬件電路總體框架
電動助力轉向系統的硬件電路主要包括以下模塊:MC9S12DP256微控制器、電源電路、信號處理電路、直流電機功率驅動模塊、故障診斷模塊與顯示模塊、車速傳感器、扭矩傳感器、發動機點火信號、電流及電流傳感器等接人處理電路,另外還有電磁離合器等,EPS系統的硬件邏輯框架如圖2所示。

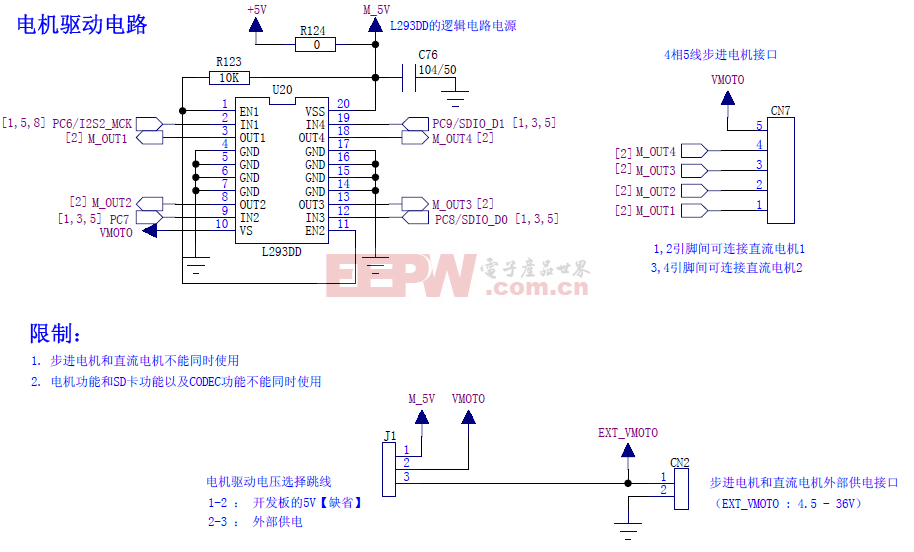
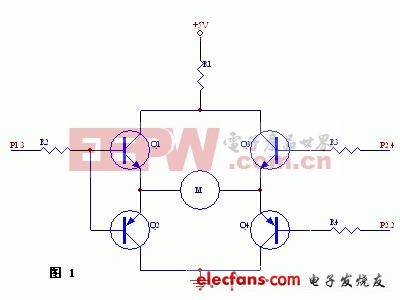
直流電動機是EPS系統的執行元件,電機的控制電路在系統設計中有著特殊的地位。在本系統中采用脈寬調制(PWM)控制H橋電路實施對直流電動機的控制,由4個功率MOSFET組成[2],如圖3所示。采用PWM伺服控制方式,MOSFET功率管的驅動電路簡單,工作頻率高,可工作在上百千赫的開關狀態下。系統采用4個International Reetifier公司生產的IRF3205型MOSFET功率管組成H橋路的4個臂。IRF3205具有8 mΩ導通電阻、功耗小、耐壓達55V、最大直流電流110A、滿足EPS系統對MOSFET功率管低壓(正常工作不超過15V)大電流(額定電流30 A)的要求。

上側橋臂的MOSFET功率管驅動電路如圖4所示,其中Qa/Qb為上側橋臂的功率MOSFET a管或b管,vdble為倍壓電源電路提供的電源電壓。當MOSFET的控制信號a(b)為高電平時,Q1和Q2導通,電源通過Q2,D1以及R5與C1的并聯電路向Qa充電,直至Qa完全導通,Q3截止。當Qa導通時,忽略Qa的漏極和源極之間的電壓降,則Qa的源極電壓等于蓄電池電源電壓。此時,Qa的柵—源極電壓降VGS=( Vdble-VCE-VF-Vbat),其中VCE為2N2907的集一射極飽和導通電壓,其典型值為0.4V[3],VF為D1的正向導通壓降,其典型值為0.34V[4],Vbat為蓄電池電壓。為保證器件可靠導通,降低器件的直流導通損耗,VGS不低于l0V[5]。因此需設計高效的倍壓電源電路,以保證Vdble的值足夠大,滿足功率MOSFET的驅動要求。如果蓄電池電壓為12V時,Vdble≥12V+0.34V+0.4V+10V=22.74V。 電流傳感器相關文章:電流傳感器原理 脈寬調制相關文章:脈寬調制原理 鎖相環相關文章:鎖相環原理





評論