FlexRay為實現更高級的駕駛體驗鋪平了道路

在X5的底盤和懸掛控制系統中采用FlexRay似乎是個良好的開端。不過真正的用意在于為駕駛一族提供新一代的汽車控制總線,同時有助于獲取實際應用中有關系統運行方面的更多信息。許多其他的汽車制造商也在期盼加快FlexRay總線的研發速度。
該總線的作用將會越來越突出。就像X5的自動駕駛系統一樣,FlexRay總線的部署將會從某幾個控制系統開始來取代CAN(控制器區域總線)總線。其他的FlexRay部署將能夠實現一些CAN無法支持的新應用。在此期間,FlexRay總線將會和迄今為止仍是最重要的汽車總線CAN一起并存。而LIN(本地互聯網絡總線)總線將更適合于控制窗戶和其他一些簡單的功能,在短期內似乎也不會退出市場。
不過隨著汽車變得愈加復雜以及更多系統的加入,往CAN和LIN總線無法提供的更復雜的控制總線過渡是毫無疑問的。
無論是對于安全還是性能,FlexRay很快就會顯示其重要性。最終,它將會成為所有安全和駕駛性能的主要通信通道。這一技術革新的優點包括了降低制造成本和提高可靠性。
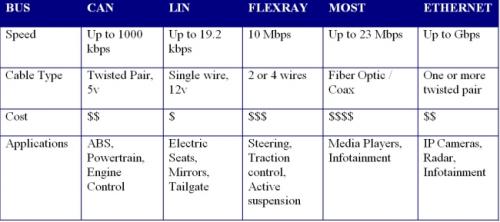
如果用更技術性的語言來表達,那就是未來汽車需要FlexRay提供的較高帶寬(10 Mbits/s,而CAN的帶寬僅為1 Mbit/s),而且其確定性協議能夠確保對關鍵任務的超快速響應。
作為能夠支持汽車線控(線控駕駛,線控剎車等)的技術,FlexRay顯然能夠將汽車性能提高到前所未有的水平。還有其他一些趨勢也推動著它的普及,包括制造效率,安全法規以及消費者對便利性需求的增加等。
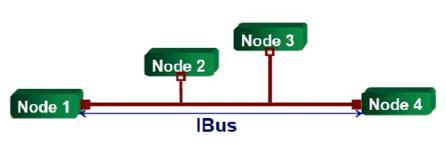
出于這些原因,在FlexRay中設計了10-Mbit/s帶寬、內置的容錯功能、還有確定性的協議。汽車技術中的每一個進展都是逐步演進的。因此FlexRay也能夠適應多種網絡拓撲結構-線性節點、無源星形、有源星形以及幾種模式的組合。由于它具有可升級性,因此能夠滿足未來幾十年可能出現的新技術挑戰。
演進而非革命
汽車電子在定義駕駛體驗中正起著越來越大的作用。從發動機管理開始,緊隨其后的是汽車音響。如今,包括傳動系、車身、底盤、輔助駕駛系統以及主動和被動安全系統在內的所有主要系統都實現了電子控制。
早在90年代初,人們就已經清楚地認識到,將這些系統組網到一起實現相互交互具有許多優點。CAN正是在那時推出的。
以前,每一個電子控制單元(ECU)都是一個獨立自治的功能單位。隨著ECU數量的不斷增加,以及電子控制系統所能提供的技術能力的增強,發展趨勢開始從組網到一起的ECU轉向功能分散到多個ECU上實現的分布式系統。
但隨著系統越來越復雜,人們又認識到車內網絡不僅要提供更快速的數據傳送,而且還必須提供確定性的和具備容錯功能的通信鏈路。于是,唯一的發展之路就是先進的分布式控制系統。
FlexRay的研發始于2000年由下述四家公司創立的一個行業聯盟,這四家公司分別是寶馬、戴姆勒克萊斯勒、恩智浦(當時的飛利浦半導體 )和摩托羅拉SPS(即現在的飛思卡爾半導體公司)。在過去六年里,FlexRay聯盟又增加了120多家公司。
從芯片開始應用FlexRay
在汽車中用芯片實現最新的FlexRay 2.1協議要求具有頻率高達80MHz的32位微控制器的處理能力,這相當于英特爾早期的奔騰微處理器的處理能力。
此外,芯片需要使用多層總線—這是早期奔騰微處理器都不具備。
還需記住的是,FlexRay還要在未來與其他的汽車總線共存一段時間,于是當芯片用于網關設備時,它必須能夠整合三種不同類型的通信控制器,即前面提到的FlexRay 2.1通信控制器,至少5個或6個CAN 2 控制器,以及多個LIN 2 主控制器。
FlexRay決非一個簡單的協議。要成功實現這樣的芯片設計,必須對其所控制的系統、這些系統所用的設備和環境都有深入的理解。而單從芯片設計的角度來看,也具有很高的復雜度。
在設計FlexRay控制器時,可用的架構方案有可能不止一個,而且在實現每項功能時也有許多選擇。架構和設計的變化組合可能有許多種-但能夠實現最好性能并具有最低成本的只有一種。
芯片性能的關鍵是控制器-主機接口。精密集成為芯片設計師提供了全新設計的機會,而無需再利用FlexRay獨立控制器芯片上提供的接口。




評論