并聯運動機床數控系統研究

1 引言
并聯運動機床(Parallel Kinematics Machine Tool,PKM),簡稱并聯機床(Parallel MachineT001),也稱虛擬軸機床,它以空間并聯機構為基礎,充分利用計算機數字控制的潛力,以軟件取代部分硬件,以電氣裝置和電子器件取代部分機械傳動,使將近兩個世紀以來以笛卡兒坐標直線移動為基礎的機床結構和運動學原理發生了根本變化。混聯型并聯運動機床(HybridPKM),簡稱混聯機床,屬于并聯運動機床概念范疇。混聯結構包括串并聯型、并串聯型和復雜混聯型,由少自由度純并聯機構再串聯其它運動方向的驅動機構構成。混聯運動機床混合了并聯機構和串聯機構,并兼具兩者的特點。混聯運動機床在很大程度上解決了純并聯機床在加工范圍上的限制,使并聯機構的應用更具靈活性和實用性。各種不同的串聯并聯結合,為并聯運動機床帶來了很大的發展空間。
并聯機床與傳統機床在運動傳遞原理上有著本質的區別,而且結構和配置呈多樣化形式,很難有一種控制系統適合所有并聯機床的要求,因此需要機床開發者自行配置控制硬件和軟件,并要求并聯機床的控制系統必須是開放結構,以提高系統適用性。目前,比較現實的實現開放式數控系統的途徑是PC+多軸控制器。這種結構中,PC機處理非實時部分,實時控制部分由多軸控制器來承擔,形成多級分布式控制模式。這樣架構出來的數控系統既具有前端PC機的柔性,又具有專用CNC系統的穩定性和可靠性。目前在國內市場上,性能價格比較高的當屬PMAC開放式控制系統。由于PMAC運動控制器優異的軌跡跟蹤能力和開放特性,在很多高性能的數控系統和研究項目中選用它構建開放式控制系統。TurboPMAC多軸運動控制器是PAMC系列的升級版本,保持了PMAC的優良性能,其特有的多種開放特性,更適合于構建復雜的開放式數控系統。
北京理工大學在“985”項目的支持下,研制成功了3PRS-XY混聯型并聯機床樣機,作者結合該機床的研制,設計了基于“PC+TurboPMAC”模式的開放式數控系統。
2 混聯機床結構
新型3PRS-XY型混聯機床為五軸聯動加工機床,實物如圖1所示,由并聯機構和串聯機構兩部分構成。上半部分為一個3自由度的3-PRS型并聯機構,包括固定平臺和動平臺,固定平臺和動平臺之間通過三個定長桿件聯接,每一桿件鏈包含移動副(P)、轉動副(R)和球面副(S)。三個移動副水平120°均勻分布在固定平臺的立柱上,并由直線電機驅動。該機構的動平臺具有一個平動自由度(Z軸)和兩個旋轉自由度(A、B軸)。下半部分為X-Y工作臺,具有兩個平動自由度(X、Y軸)。

圖1 3PRS-XY混聯機床
3 數控系統硬件構成
控制系統采用“PC+運動控制器”的開放模式,如圖2所示。 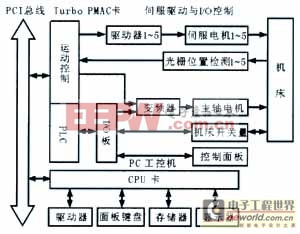
圖2 數控系統硬件構成
PC機選用研華AWS-2848VTP一體化工作站,運動控制器為美國DeltaTau公司的TurboPMAC多軸運動控制卡。控制系統包含五套伺服驅動系統,分別用于并聯機構的三組直線電機驅動和串聯機構的兩組交流伺服電機驅動。采用光柵尺進行位置檢測。通過TurboPMAC的五個伺服控制通道,實現五組伺服系統的閉環控制。利用TurboPMAC的第六個伺服通道控制主軸電機變頻器實現主軸調速,以支持數控代碼中的主軸速度指令。I/O板連接到Turbo PMAC上,通過內置的PLC功能控制機器的輔助功能設備、主軸啟停、檢測機床限位、驅動指示裝置和報警裝置、檢測控制面板輸入指令信號等。
控制系統的特點是,以PC總線工業控制計算機為控制核心,以PMAC多軸控制卡為運動控制模塊,形成以PC機為上位機、TurboPMAC多軸控制卡為下位機的分布式控制。
4 數控系統工作原理
圖3為數控系統的工作流程,順序由PC、TurboPMAC和伺服驅動系統三部分完成整個數控過程。該控制流程在組成結構上與目前基于“PC+PMAC”并聯機床數控系統的研究成果相比,最大特點就是將粗插補和逆運動學變換嵌入到TurboPMAC中,使3PRS-XY混聯機床數控系統實時控制性能明顯提高。

伺服電機相關文章:伺服電機工作原理





評論