基于工控機的常導中低速磁懸浮列車機械制動控制系統

磁懸浮列車是一種輪軌非粘著傳動、懸浮于軌道的新型軌道交通運輸系統,是介于鐵路和航空之間的一種獨特的運輸方式。在2001年研制的第一輛常導中低速磁懸浮列車實驗線中,除了采用電制動以外,還設置了機械制動和支撐滑塊制動。實驗表明,幾種制動方式中,電制動和支撐滑塊制動都達到很優的效果。
為了達到更優的性能指標,對正在改型的第二輛常導中低速磁懸浮列車的機械制動進行了改進。但是,機械制動受外界環境的影響很大,為了有條件地改變制動力,有效地克服外界環境的影響,引入了減速度控制方案。本文利用工控機、數控、數據采集等技術,對常導中低速磁懸浮列車的機械制動系統進行了設計,實現了計算機控制的機械制動。整個制動系統由機械制動裝置、工控機、高速數據采集卡、開關量輸入板、開關量輸出板等組成,實現對常導中低速磁懸浮列車機械制動的自動控制和監測。
2、機械制動的制動原理
目前我校自行研制的改進型常導中低速磁懸浮列車的機械制動采用了氣一液制動方式,為了減小制動器的體積,制動的工作介質采用液壓油。機械制動氣路結構如圖1所示。
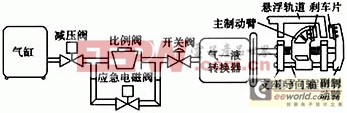
圖1 磁懸浮列車機械制動結構圖
系統由比例閥、氣液轉換器、制動器組成。氣壓調節選用了電流型的比例氣壓調節閥,其入口氣壓由恒壓閥調節在0.6MPa左右。車輛的氣液轉換器的最大增量氣壓設置為0.4MPa,最大油壓可以工作在10MPa左右,因此我們選用轉換比為1∶25的氣—液轉換器。當控制電流為4~20mA時,輸出氣壓在0~0.4MPa變化,制動器的制動油壓相應在0~10MPa之間變化,每臺制動器的制動臂產生0~9000N的夾持力。如果摩擦片的磨擦系數在0.3左右時,單臺制動器的制動力可以大于2500N。由于每輛車有16臺制動器,共可產生大于40000N的制動力,在磁浮車處于額定載重條件下(總重30t時),僅機械制動即可產生大于1.3m/s2的減速度效果。
為了保證車輛在比例氣壓調節閥失效或需要緊急制動的情況下,仍然能夠完成制動目的,在比例氣壓調節閥側還并聯了一個開關型電磁閥,作為應急控制之用。
因此,通過調節比例閥的電流就可以改變制動器的制動力,從而得到制動減速度。采用計算機實現對制動系統的閉環控制,駕駛員可以自如地依需要的減速度來控制車輛的制動運行。
3、機械制動系統的建模
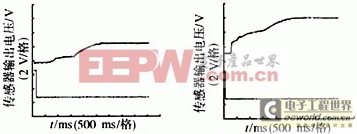
要實現機械制動的控制,首先要對機械制動的各個部件進行建模。制動器總成的油壓建立通過了管道,并有一定阻力,另外,制動器還有運動空行程,因此制動力的產生有一定的延遲時間,機械制動系統屬于非線性系統。在比例閥以及氣液轉換器處分別安裝氣壓傳感器和液壓傳感器,通過改變比例閥的控制電流來改變制動系統的各個控制部件的輸出,測得各部件的特性曲線。當比例閥的輸入電流階躍變化時,實驗得出系統的階躍響應曲線,然后分析圖形特性,建立系統的參數模型,確定傳遞函數的結構和參數。
圖2為磁懸浮列車機械制動控制部件的特性曲線圖。當比例閥的調節電流調節到6.30mA時,制動器夾住,當調節電流在6.30~16.54mA變化時,氣壓傳感器和油壓傳感器的輸出電流都呈線性變化,輸出氣壓在0.08~0.5MPa變化,輸出油壓在1~10MPa變化。當比例閥的輸出電流下調時,氣壓有一定的回環。
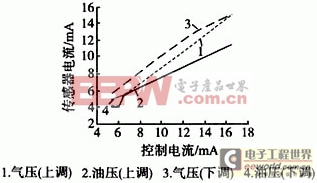
圖2 磁懸浮列車機械制動控制部件的特性曲線
圖3和圖4分別為比例閥和氣液轉換器的階躍響應曲線。
通過辨識,可得到各部件的數學模型如下:
比例閥的模型為:
磁懸浮列車有16臺制動器總成,安裝夾持力傳感器在實際中不好實現。但是,當實現了制動系統的氣壓調節作用時,實際上就間接地控制了制動油壓和制動器的夾持力,該過程忽略了管線、制動器部件運動的摩擦阻力,因此設計氣壓校正網絡來實現夾持力閉環控制,誠然,只使用夾持力閉環控制時,由于自然條件和軌面的條件不同,同樣的夾持力,可能獲得的制動效果不同,制動的效果與駕駛員的經驗有關。采用減速度閉環控制時,駕駛員可以通過制動手柄,控制不同的減速度,駕駛員對制動手柄的控制是以減速度給定值不大于1.3m/s2為上限的,因此設計了氣壓和減速度為反饋量的雙閉環控制系統。其反饋控制框圖如圖5所示。氣壓校正網絡W2(s)用于控制氣壓,即間接地控制了夾持力,加速度校正網絡W1(s)則用于控制減速度,使減速度不至于過大,并可以從0~1.3m/s2之間進行線性操作。
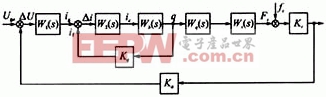
圖5 機械制動系統反饋控制框圖
4、計算機控制的機械制動系統組成
計算機控制的機械制動系統主要由傳感器(加速度、氣壓)、A/D轉換卡、開關量輸入卡、D/A轉換卡、工控機(包括控制程序)等組成。如圖6所示,被控對象是列車的減速度,當制動時,由加速度傳感器測量制動減速度的值,經過A/D轉換,送入工控機。工控機對測量的減速度信號進行數字濾波,并和制動手柄給定的減速度信號進行比較,通過減速度控制器W1(s)(由軟件實現)計算出減速度控制信號,與氣壓傳感器采集的氣壓反饋信號比較,獲得誤差信號,再通過氣壓控制器W2(s)(由軟件實現)得到氣壓控制信號,經過D/A轉換,驅動比例閥控制氣壓從而改變制動力的大小,最終達到所希望的減速度。




評論