無線傳感器網絡中的DV—HOP定位改進算法

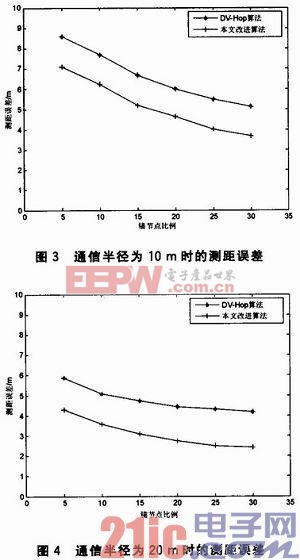
在同等條件下,改進的測距誤差始終是低于原DV—Hop算法的,且不同的通信半徑對測距誤差也會產生不同的結果。圖3中,通信半徑為10 m,改進后的算法平均測距誤差比原算法降低1.45 m;圖4中,通信半徑為20m,改進后的算法平均測距誤差比原算法降低1.67 m。這是因為隨著通信半徑的變化,會對節點間的跳數和平均跳距產生影響。由于本文改進后的算法是用全網的平均跳距代替單個節點的平均跳距,這樣使得對平均跳距的估計更為準確,估算距離也就越準確,越接近實際的距離。
3.2 定位誤差
定位誤差(Localization Error,LE)是指通過定位算法測量估計的坐標與實際坐標之間的差值,用這種差值除以節點的通信半徑,就是定位誤差率。計算方法如下:
![]()
其中,(x,y)為未知節點的實際坐標,(xi,yi)為定位算法所估計出來的坐標;R為節點的通信半徑。
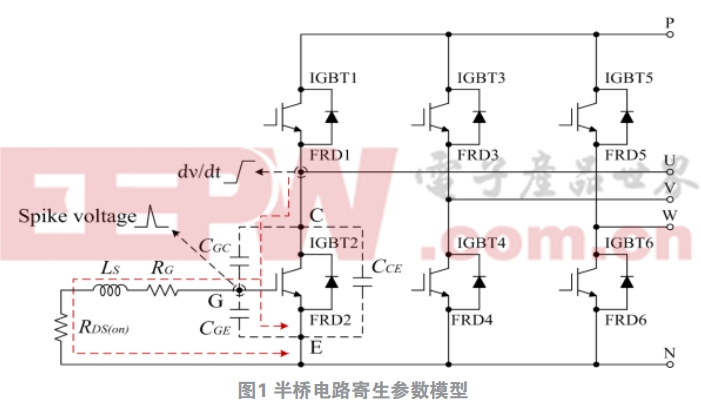
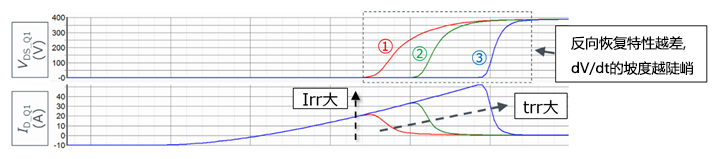
圖5和圖6是節點總數分別為100和300、節點通信半徑為10 m時,本文改進算法、DV—Hop算法和參考文獻中的算法三者在錨節點比例不同時的定位誤差比較結果。從兩幅圖中可以看出,在相同的半徑和錨節點的環境下,改進算法的定位誤差率要低于DV—Hop算法和參考文獻中的算法。但是在錨節點比例較低的情況下,節點的定位誤差較大。這是因為錨節點較少時,未知節點與錨節點之間的距離變遠,導致計算平均距離時會產生很大的誤差。因此隨著錨節點比例的增加,能夠有效地減小定位誤差。
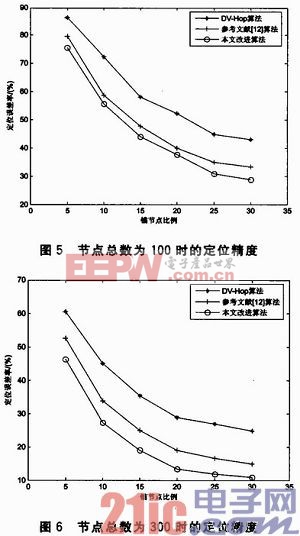
圖5中,當錨節點的比例為30%時,DV—Hop的定位誤差率為43.25%,參考文獻算法的定位誤差率為33.37%,而本文改進算法的定位誤差率為28.34%。圖6中,當錨節點的比例為30%時,DV—Hop的定位誤差率為26.89%,參考文獻算法的定位誤差率為14.95%,而本文改進算法的定位誤差率為10.21%。由此說明,本文的改進算法要優于其他兩種算法。這是因為在參考文獻中,只考慮了平均跳距一個因素對定位誤差的影響,而本文改進算法則是從平均跳距的改進和利用連通度的不同選取錨節點兩個方面考慮,使其定位誤差進一步地減小。
結語
本文首先介紹了DV—Hop算法的基本思想,針對經典的DV—Hop算法中存在的定位精度不高的缺陷,提出了兩點改進:
單個錨節點所估計的平均跳距來代替全網的平均跳距,會產生很大的誤差,因此平均跳距利用全網平均跳距與單個錨節點估計的平均跳距的均值來修正;
根據連通度的不同選擇最優的三個錨節點進行三邊定位計算,以提高定位精度。
仿真實驗數據表明,改進后的算法降低了測距誤差,與參考文獻等提出的算法比較,定位誤差率進一步降低,從而提高定位精度。且在改進的過程中,沒有添加硬件成本。







評論