無線傳感器網絡中的DV—HOP定位改進算法


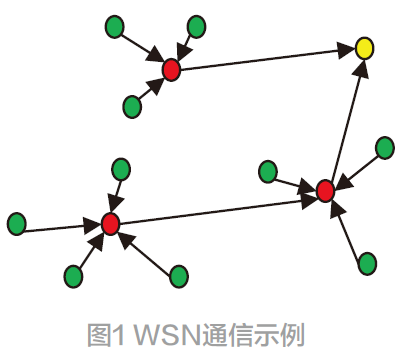
用未知節點之間連通度差的絕對值的和來定義連通度的不同,比如N1與N2之間連通度的不同為|1—2|+|1—1|+|2—1|+|5—4|=3。這樣可以計算N1到其他所有未知節點的連通度的不同,如表2所列。

由表2可以得出,N2、N3到N1連通度不同為3、4,而N4、N5到N1連通度不同為9、11。說明N1離N2、N3更近。這一點也可以從圖1中看出。
2.2.2 確定最優的3個錨節點
選擇性錨節點的節點分布圖如圖2所示。未知節點Nx代表未知節點的實際位置,N(i,j,k)為根據3個錨節點組合所估算的位置,R為節點的通信半徑,An是離N(i,j,k)最近的錨節點,Am為通信范圍R之外的任意錨節點。

An的位置情況有3種:在0.5R的通信范圍內;在0.5R~R的通信范圍內;在R通信范圍之外。這樣計算AHD(i,j,k),m就有3種可能:

其中,AHD(i,j,k),m為根據3個錨節點組合所估算的位置節點與錨節點Am之間的平均跳距,AHDn,m為錨節點An與錨節點Am之間的平均跳距,AHDm為錨節點Am的平均跳距。
N(i,j,k)與錨節點Am之間的距離P(i,j,k),m可以計算出來,那么就可以算出N(i,j,k)與錨節點Am之間的跳數hop(i,j,k),m,公式為:
![]()
假設一共有n個錨節點,這樣N(i,j,k)與Nx計算出來的連通度的不同可以表示為
![]()
Nx選出最小的連通度不同的節點是最為靠近Nx的節點(即定位的誤差最小)。
3 算法仿真實驗
為了驗證算法理論的可行性,在100 m×100 m的區域中,對提出的改進的DV—Hop算法用Matlab7.0進行實驗仿真,將實驗結果與原DV—Hop算法和參考文獻的算法進行對比分析。仿真數據隨機運行50次,最后取平均值。
3.1 測距誤差
測距誤差是指節點間的估算距離與實際距離的差值。在100 m×100 m的區域中,隨機分布100個節點進行仿真實驗,其中有一部分部署的是錨節點,是能夠獲知自身位置信息的節點,且錨節點和未知節點具有相同的通信半徑。通過設置不同的錨節點比例和節點通信半徑,比較改進的算法與原DV—Hop算法對測距誤差的影響。圖3為通信半徑為10 m時的測距誤差,圖4為通信半徑為20 m時的測距誤差。







評論