岸邊橋式集裝箱起重機PLC程序的設計與實現

由于PLC控制系統可靠,方便等特點,其已在集裝箱起重機上廣泛使用,目前已取代了早期的繼電器控制回路系統。同時由于總線系統的發展,PLC所需采集的各類開關,傳感器信號可以通過遠程I/O站實現,大大節省了電纜布線成本,也節約了故障查詢時間。本文主要闡述的就是岸橋控制系統的核心內容設計:岸橋PLC程序的設計與實現。
在這套系統中,控制系統的主要元件PLC是采用了SIEMENS公司的S7-400作為PLC主站,ET200作為遠程模塊站。整個系統通過PROFIBUS總線將PLC主站與各遠程模塊站及控制傳動機構的變頻器相連,見如下單線圖1-1所示:
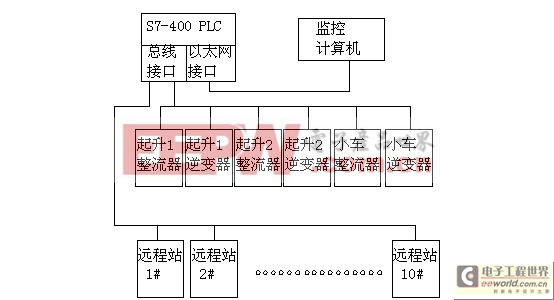
圖1-1:以PLC為核心的岸橋電氣控制系統圖
圖1-1中,S7-400 PLC是整個系統的核心所在,它有兩個PROFIBUS總線接口,一條總線連接所有傳動機構變頻器(變頻器由整流器與逆變器組成),這樣一來變頻器所需要的命令,運行狀態的反饋等信號均可以通過PROFIBUS通訊來實現。另一條總線則連接所有的I/O遠程站,實現采集信號和輸出信號,大大節約了布線。PLC同時也帶有以太網接口,可以方便的與計算機連接,這樣一來工程技術人員可以通過計算機的人機界面來監控岸橋的運行,同時該計算機也可以作為編程器,用來配置PLC硬件,修改PLC程序。
2. 岸橋PLC程序編寫
對岸橋的PLC系統來說,其需要控制的內容有岸橋的起升, 大車, 小車, 俯仰這四個主要機構的運行與輔助機構的運行,四個主要機構都有相同的運行過程,如下圖2-1所示:
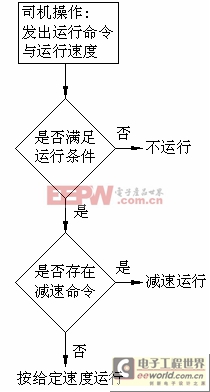
圖2-1:岸橋主要機構運行過程
因此在這過程中的“是否滿足運行條件”與“是否存在減速命令”是編寫岸橋PLC程序所必須清楚的情況,我們在這里必須通過工況分析,有了清楚的了解之后,才能正確的編寫程序。以下我們將以起升機構為例,對工況進行詳細的分析。
2.1. 岸橋起升機構工況分析
2.1.1. 岸橋起升機構的組成
起升機構的主要作用是通過鋼絲繩與吊具上的滑輪將吊具作上下的移動。當吊具吊了集裝箱之后,集裝箱就可以通過起升機構實現上下移動,比如將集裝箱從船艙或集裝箱卡車上提取。起升機構的組成除了吊具與鋼絲繩之外,還包括兩套并行連接的機械傳動裝置,每套傳動裝置的組成如圖2-2所示:有一個交流電機聯接一個減速箱。在電機與減速箱之間的主軸上裝有一個液壓推桿盤式制動器。電機非驅動側出軸安裝有測速編碼器和超速開關。在卷筒的一側出軸上裝有一個凸輪限位開關。
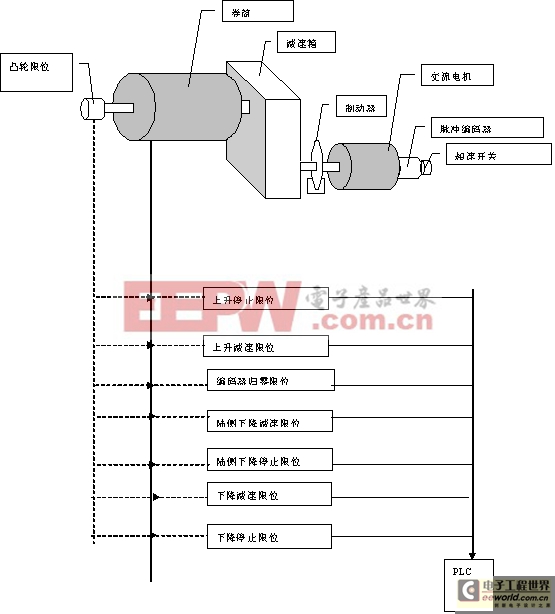
圖2-2:起升傳動機構組成
2.1.2. 岸橋起升機構的運行控制
起升機構運行過程控制如下:
l PLC采集司機發出的運行指令及速度給定指令。
l 通過PLC程序進行邏輯判斷,判斷是否滿足“運行允許”的情況。
l 如果PLC程序邏輯判斷滿足“運行允許”的情況,接下來要進行的就是起升速度的處理,其處理如下:
n 如果不存在減速運行命令,則傳動機構按司機給定的速度運行。
n 如果PLC收到減速運行信號,PLC則將速度處理為司機給定速度的10%。
l 最終,PLC需將這些運行命令,運行速度通過PROFIBUS總線傳輸給變頻器,變頻器帶動電機運行,實現起升機構的運行。

評論