6kV·A逆變器滯環調制與單極性倍頻調制的比較

0 引言
逆變器主電路是一個開關式大功率放大器,逆變過程的實質是模-數-模的變化過程,它包括模-數和數-模兩個變換,分別對應于數字通信技術中的調制編碼與解調兩個過程[1]。SPWM調制與滯環調制是目前逆變器中最常見的兩種調制方式,它們分別從數字通信的脈寬調制和Delta調制發展而來。通信中調制的目的是為了遠距離傳輸信號,而在電力電子裝置中則是為了減小系統的體積、提高系統的動態響應和降低輸出諧波含量。在逆變器的輸出端需要并聯輸出濾波器,它相當于數字通信技術中的解調環節,其作用是濾除輸出波形中無用的高次諧波。通過這兩個環節,就實現了對基準波的功率放大。
文獻[2]對SPWM調制和滯環調制做了仿真和實驗分析。文獻[3]討論了6kV·A電流滯環調制逆變器的研制并給出了輸出波形。本文則從調制原理、系統的輸出濾波器設計和最終輸出波形THD等方面對兩臺分別采用電流滯環調制和電流型單極性SPWM調制的6kV·A單相逆變器實際系統進行了研究和比較。
1 主電路與電壓電流雙環反饋控制
圖1為逆變器主電路和控制系統的框圖,主電路采用了全橋結構,輸出端連接了LC濾波器濾除高次諧波。兩個電路在控制上均采用了輸出電壓和電感電流雙環控制,這種控制方式在保證系統穩定的同時還具有良好的動態特性與輸出限流的特性。從圖1可以看出,SPWM調制的逆變器和滯環調制的逆變器,除了調制器部分不同外,其余部分的電路在結構上完全相同,只是在參數上有所不同。因此,這兩個系統在輸出特性以及輸出濾波器上的差異基本上可以認為是由這兩種不同的調制方式所決定的。兩個系統的輸入均為DC380V,輸出均為220V/50Hz,輸出功率為6kV·A。
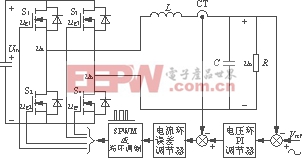
圖1 逆變器主電路與控制系統框圖
2 兩種調制方式原理
2.1 SPWM調制原理
單極性SPWM調制又分為非倍頻和倍頻兩種方式,本文所討論的SPWM調制的逆變器采用的是倍頻方式,它在不改變開關管工作頻率的情況下,通過對門級脈沖控制,可以使得輸出波形中最低次諧波頻率是開關頻率的2倍,從而可以減小濾波器的體積。圖2是這種調制方法的原理。
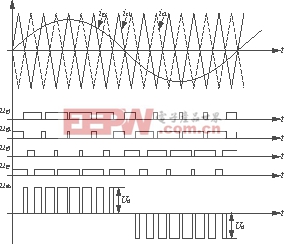
圖2 電流型單極性SPWM倍頻調制原理
在電流型單極性SPWM倍頻調制中包含有兩個載波信號ic1和ic2,且有
ic1=-ic2(1)
調制信號ig與ic1與交截產生ug1與ug2信號,控制S1與S2的開關,ig與ic2交截產生ug3與ug4信號,控制S3與S4的開關。這種調制方式的實質是將一個全橋變換器拆分成兩個半橋變換器,分別用兩個相位相反的正弦波進行調制后得到的信號去控制它們(在這里采用的是載波ic1反相,等價于將ig反相),這樣兩個橋臂輸出的基波就為帶相同直流偏置、幅值相等且相位相反的正弦波,將這兩個輸出相減再濾除高頻分量,就得到了標準的正弦輸出波形。
2.2 滯環調制原理
三態滯環調制是從基本的Delta調制發展而來,圖3是它的調制原理。

圖3 電流滯環調制原理
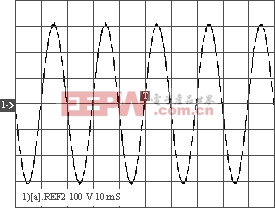
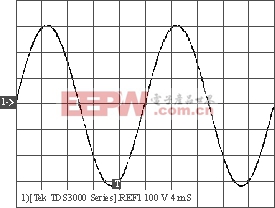
滯環調制沒有單獨的載波信號,而是將輸出信號通過反饋網絡產生一個斜坡函數iLf做為載波。h為滯環寬度,當iLf 2.3 兩種調制方式原理的比較 從兩種調制方式的原理可以看出滯環調制本身就包含了一個反饋環節,是一個閉環系統。而SPWM調制則是一個開環系統,其本身不包含反饋環節。因此,滯環調制系統的穩定性和抗干擾性能要好于SPWM調制。在實際系統調試中,滯環調制的逆變器系統控制環參數容易調到穩定,而單極性SPWM倍頻調制的逆變器系統控制環參數,則需要經過多次的調整才能得到一個滿意的參數。 另一方面滯環調制下的開關頻率并不固定,而是跟隨正弦給定和負載大小的改變而改變,因此,滯環調制下逆變器輸出電壓波形中包含了大量的較低次諧波,而且很難從理論上分析其諧波分布。在最大開關頻率限定在20kHz情況下,其最低次諧波頻率甚至會低至幾kHz,文獻[2]通過仿真驗證了這一結論。單極性SPWM調制下開關頻率是固定的,而且在倍頻方式下SPWM輸出電壓波形中的最低次諧波集中在2倍載波頻率附近,在本文所討論的系統中為40kHz。所以,SPWM調制方式下的逆變器輸出濾波器要比滯環調制方式的逆變器輸出濾波器小得多。 3 輸出濾波器的設計 逆變器兩個橋臂中點之間的輸出電壓是一個高頻的方波脈沖,對其作頻譜分析可知它的基波頻率與調制波相同,而其高次諧波則由調制方式所決定。高次諧波對逆變器負載是有害的,甚至會引起負載的不穩定,所以,在逆變器的輸出端需要使用一個低通濾波器將高次諧波濾除。本文所提及的兩臺逆變器的輸出濾波器均采用Γ形的LC濾波器,在結構上完全相同,但其設計步驟和具體參數則有所不同。 3.1 SPWM調制下濾波器的設計 SPWM調制下輸出濾波電感的值一般是由電感電流的的最大紋波所決定,取該值為滿功率輸出時正弦電流峰值的15%,即 ΔImax=15%×2× 在單極性SPWM倍頻調制下,ua與ub兩點的電壓波形是單極性SPWM脈沖,其占空比 D= 所以,可得電感電流紋波的表達式為 ΔI= 由式(4)可知,當uo=1/2Uin時,電感電流紋波最大,且 ΔImax= 綜合式(2)與式(5)可得 L(>=) 實際電路中取電感值為0.5mH。 電路中電容的作用是和電感一起構成一個低通濾波器,因此,在電感值確定后,就可以根據L濾波器的截止頻率來確定電容C的值。由于SPWM倍頻調制方式下,輸出諧波為開關頻率2倍及以上的高次諧波,所以可以取截止頻率為最低次輸出諧波頻率的1/10,即 推得 C(>=) 實際電路中,由于器件的非理想特性、基準波也非標準的正弦波以及死區對輸出波形的影響,所以,輸出波形中還包含有一定的低次諧波,C的取值必須大一些,以對這些低次諧波有一定的抑制作用,最終取電容值為16μF。 3.2 滯環調制下濾波器的設計 滯環調制下輸出濾波器的設計和單極性SPWM倍頻調制下有很大的不同。首先,滯環調制中電感電流的紋波是由滯環寬度h所決定,用電感電流的最大紋波值來確定電感值的方法并不適用。其次,滯環調制下由于開關頻率并不固定,其輸出電壓波形諧波分布廣且不含有特定頻率的諧波[3],所以,與單極性SPWM調制下根據器件開關頻率設定輸出濾波器的截止頻率不同,其輸出濾波器的截止頻率應該根據輸出的基波頻率來設定。本文中逆變器的輸出頻率為50Hz,取輸出濾波器的截止頻率為輸出頻率的10倍即500Hz,可得 從式(9)可以確定L和C的乘積值,再進一步確定L和C的取值則多依賴于工程經驗進行綜合考慮。如果L值過大將使系統的動態響應太慢,甚至使得電感電流追蹤不上ig的變化導致系統失調;L值過小則會增加輸出的脈動,增大損耗。C值越大輸出電壓的THD就越好,但同時也會增大逆變器的無功電流,增大損耗。工程中一般可以根據在剪切頻率附近使得 ωL≈ 來確定L和C的取值。 根據式(9)和式(10),最終實際系統中取L為1mH,C為80μF。 3.3 輸出波形與THD 圖4和圖5是兩種調制方式下6kV·A逆變器在阻性負載下的滿載輸出波形,表1則是使用功率分析儀測得逆變器在空載、半載和滿載情況下輸出THD值,可見SPWM調制方式下的輸出THD要明顯好于電流滯環調制方式下的輸出THD值。 圖4 電流滯環調制逆變器阻性滿載輸出波形 圖5 SPWM倍頻調制逆變器阻性滿載輸出波形 表1 兩種調制方式下空載與滿載輸出THD值 負載![]() =5.78A(2)
=5.78A(2)![]() (3)
(3)![]() (4)
(4)![]() (5)
(5)![]() =0.43mH(6)
=0.43mH(6)![]() (7)
(7)![]() =3.17μF(8)
=3.17μF(8)![]() =500(9)
=500(9)![]() (10)
(10)
滯環調制 SPWM倍頻調制 有效值/V THD/% 有效值/V THD/% 空載 221.1 1.0 222.1 0.6 半載 219.8 1.2 219.8 0.7 滿載 217.8 1.3 218.3 0.7
4 結語
綜上所述,電流滯環調制作為一種非線性的調制方式,和SPWM倍頻調制相比,它具有穩定性強和動態響應快的優點。但滯環調制的逆變器輸出波形諧波分布廣,這使得濾波器的設計困難,在相同的功率等級下,盡管使用了大得多的濾波器,滯環調制逆變器輸出波形THD值仍達到接近兩倍SPWM倍頻調制逆變器輸出波形THD的值。同時也由于諧波頻率豐富,滯環調制的輸出濾波器的工作噪聲也要比SPWM倍頻控制大得多。所以,從改善輸出波形和減小濾波器體積和噪聲角度考慮,SPWM倍頻調制顯然是更好的選擇。




評論