詳解與公用電網相連的逆變器在建模與控制方面電路設計

 補償器零點的頻率為KI/KP,假設它低于電廠R/L極點的頻率。因此,波特圖的漸近線如圖4所示。
補償器零點的頻率為KI/KP,假設它低于電廠R/L極點的頻率。因此,波特圖的漸近線如圖4所示。
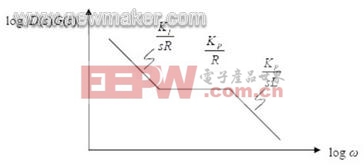
圖4:開環波特圖漸近線
圖5為電流調節算法的框圖。當動態坐標系轉換為旋轉參考坐標系時,三相和單相系統都可以使用該算法。PI控制器的數字實現方式如下:
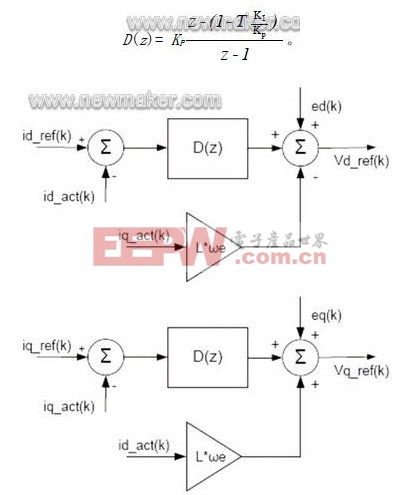
圖5:電流調節算法PWM實現
為單個相位計算完基準電壓后,PWM生成算法將為每個逆變器開關生成占空比。正弦PWM技術很容易實現且非常有效。正弦PWM的生成已被模型化,因此,它能夠為2、3、4、5級逆變器分別生成開關位置。電流控制器產生的基準電壓值(Vref)介于-1至1之間。Vref根據拓撲結構內的級數呈比例變化;m代表級數。多級比較器產生的開關位置輸出值的范圍在0至m-1之間。
利用正弦PWM技術,可以單獨控制逆變器的每一個相臂。以三相逆變器為例,利用正弦PWM技術,可以將逆變器的三個相臂一起控制,從而能更好地利用可用直流總線電壓。空間矢量技術為三相控制提供了一個集中控制器。
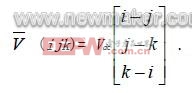
多級逆變器可以從三種或更多的分立電壓電平生成輸出電壓。對于一個m級逆變器,每個相位的開關函數值為0至m-1。相臂電壓為:

每個開關狀態可產生唯一定義的三相線電壓。當三個相位的開關位置分別為i、j、k時,逆變器輸出電壓可由開關矢量表示為:
注意:逆變器的不同開關位置可產生不同的開關矢量。對于平衡的輸出電壓來說,線到線電壓的總和必須為0。也就是說,開關矢量可以以二維的方式來表示。利用具有適當持續時間(占空比)的、最接近的三個矢量,可以實現基準電壓。也就是說,由最接近的三個矢量的時間加權組合可以生成基準電壓。調制器的主要目的是選擇逆變器的開關位置和每個開關位置需要持續多長時間,以便生成基準電壓。非正交矢量可以方便地用作表示開關矢量的新方式。單次基礎轉換如下:
 因此,。歸一化為Vdc后,所有開關位置相量均為整數。圖6顯示出gh坐標中的三級逆變器的開關位置矢量。在一個開關周期中,如果連續利用三個最接近的矢量,電壓Vref可以逆變器輸出電壓的形式實現。
因此,。歸一化為Vdc后,所有開關位置相量均為整數。圖6顯示出gh坐標中的三級逆變器的開關位置矢量。在一個開關周期中,如果連續利用三個最接近的矢量,電壓Vref可以逆變器輸出電壓的形式實現。
逆變器相關文章:逆變器原理 逆變器相關文章:逆變器工作原理




評論