以提高自身響應速度為目的磁控電抗器快速性研究

U的值在系統發生電壓波動瞬間,由KP1(KP2)的導通角便可得出。
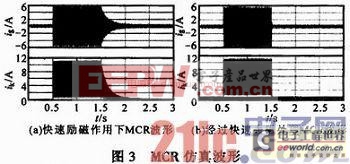
狀態3 V1在V2關斷5 ms后導通,投入工作電壓,延時5 ms是防止兩個不同的電壓并聯。此時電流仿真波形如圖3a所示。由圖可見,MCR經過快速勵磁后,其工作電流在一個工頻周期內即到達了額定狀態。但也可明顯看到當MCR退出系統后,仍有較長去磁時間,這對系統的穩定相當不利。因此電路中必須有快速去磁環節。
此處控制電路的另一大優點是,在進行完一次無功補償后,當檢測到C值減小時,升壓斬波電路與C連通,給C充電,使C上電壓值恒為初始值,為下一次補償作準備。從而可以連續、無限次地作用于系統。
4 實驗結果
此處裝置控制器由DSP,FPGA和CPLD等構成,其中DSP模塊負責完成數據處理,與上位機(人機交互系統)的通信及與下層結構(FPGA)的數據交換;FPGA模塊完成電壓、電流等各變量采樣及各變量的邏輯運算,并上傳數據給上層結構DSP。并將信息和數據下發給下層結構CPLD;CPLD負責直接給功率單元(IGBT模塊)的控制板下發各項數據和指標,如PWM脈沖,死區產生。基于380 W12 A磁閥式MCR進行具體實驗。交流電壓源e有效值為380 V,大功率電阻R2=200 Ω,線路等效電阻為R1,工作電源和控制電源等效內阻分別為R3和Rk,C=330μF。實驗波形見圖4。
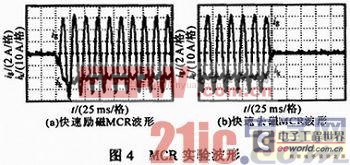
由圖可知,當投入快速勵磁電路時,ik在半個工頻周期內迅速達到穩定工作值,所對應的ig在其作用下也在半個工頻周期內達到預定飽和值,實現快速勵磁;當投入快速去磁電路后,ik在半個工頻周期內迅速由穩定工作值降為零,所對應的ig在其作用下也在半個工頻周期內從預定飽和值降為零,即實現快速去磁。
5 結論
提出一種新型磁控電抗器的快速勵磁及去磁電路。對所設計的電路進行仿真及具體實驗,可見,從空載到額定狀態和從額定狀態到空載的工作電流均達到了一個工頻周期內的響應速度。該電路起到了快速勵磁及去磁作用,極大地提高了磁控電抗器的特性,很好地實現了快速處理電壓閃變和波動。實驗電路中用DSP和FPGA混合控制系統來控制各個IGBT的工作狀態,更好地確保了該電路工作的穩定性。
電抗器相關文章:電抗器原理

評論