基于FPGA的多普勒測振計信號采集與處理系統設計方案

0 引言
本文引用地址:http://www.j9360.com/article/221564.htm傳統的淺海地形測量以船只為平臺,采用聲納技術進行,這種測量方法對于一些船只難以駛入的區域便形成了測量盲區,而機載平臺與光聲淺海測量技術的結合克服了這一缺點,大大提高了測量區域的范圍。基于激光多普勒測振技術的聲光耦合系統是光聲淺海地形遙感系統的重要組成部分,包括激光多普勒測振系統、水面反射光自適應跟蹤系統以及可調水平平臺三個部分。激光多普勒測振系統能夠應用多普勒效應,利用激光的高相干性測量光聲淺海地形遙感系統中水表面的振動速度,進而獲得水中的聲信息。該聲信息的采集和進一步處理正是通過基于FPGA 的信號采集與處理系統實現的。
針對遙感系統的工作環境特點、待處理信號的頻譜特征以及系統信噪比等要求,綜合比較多種信號采集系統方案的優缺點,本文提出了一種基于FPGA的激光多普勒測振計信號采集與處理系統的設計方案,該方案可以實現光聲淺海地形遙感探測中的水聲信號的實時采集與處理。
1 系統總體結構
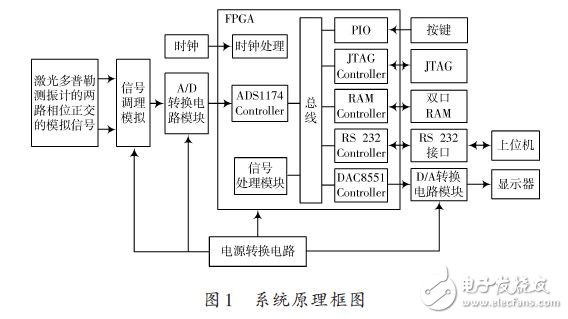
激光多普勒測振計信號采集與處理系統要求既要具有高速實時的采集和處理能力,也要具有豐富的外部接口,同時,考慮到系統穩定性和靈活性的要求,采用核心板和底層板結合的硬件結構。系統原理框圖如圖1所示,FPGA 芯片采用Atera 公司的Cyclone Ⅱ 系列EP2C5Q208C8N,它采用90 nm 工藝,具有4 608個邏輯單元。此外,系統還包括信號調理模塊、A/D轉換電路模塊、D/A 轉換電路模塊和外部接口單元等部分組成。
系統采用±15 V 電源供電,選用多塊電壓轉換芯片,提供5 V,1.8 V,3.3 V和1.2 V電壓。
2 信號采集和處理系統設計
2.1 硬件電路設計
激光多普勒測振計信號采集與處理系統采用核心板和底層板結合的硬件結構,核心板主要包括FPGA芯片、串行配置芯片(EPCS)、聯合測試調試接口(JTAG),其通過108個引腳插針與底層板插座一一對應連接。
底層板電路主要包括電源轉換電路、信號調理電路、A/D轉換電路、D/A轉換電路和串行通信轉換電路。
電源轉換電路通過7805 穩壓芯片、AMS1117 穩壓芯片和LM1085穩壓芯片實現電源電壓的轉換,為系統提供5 V,1.8 V,3.3 V 和1.2 V 電壓。信號調理電路模塊包括兩路差分放大電路,每路差分放大電路由一片高性能的全差分音頻運算放大器芯片OPA1632 構成。A/D 轉換電路模塊是在四通道16 位求和型模數轉換芯片ADS1174、穩壓芯片REF1004 以及集成運放芯片OPA350的基礎上實現的,高速狀態下,ADS1174芯片速度可以達到52 KSPS,并支持多通道并行處理。采用DAC8551 和REF02 穩壓芯片實現D/A 轉換,DAC8551是一款16 位電壓輸出模數轉換芯片,REF02 穩壓芯片為DA芯片提供2.5 V的參考電壓。由于RS 232在通信領域的廣泛應用,本文設計系統采用RS 232 串行方式進行通信,考慮到激光多普勒測振計信號采集與處理系統中FPGA 接口電路是TTL 電平,所以需要經過MAX3232芯片實現與RS 232標準電平的轉換。硬件電路板如圖2所示。

電子管相關文章:電子管原理
光耦相關文章:光耦原理
fpga相關文章:fpga是什么











評論