基于單片機與電機PWM控制的水族類喂養自動送氧送料系統

1 引言
現在家庭或餐廳飯店的水族飼養中,一般多為送氧泵一直通氧,這樣即浪費電,又浪費氧,送料更是全手工操作,現代魚類飼養科學表明:一般的水族類更喜歡夜間覓食,另外如果一次放過多的料,使水質變差,科學的飼養方法:多餐少食。
電機在現代社會中起著重要作用。現在90%的驅動來自電機。對運動控制最有用的方式是對運動源的控制,單片機在電機控制的發展中扮演了十分重要的角色。本系統通過單片機與電機的PWM控制,由控制速度達到控制送料量,實現了單片機能夠順利完成定時送氧,定時定量送料。對送料機械裝置創新性的設計,即簡單又方便,類似于洗衣機中摔水桶,靠電機轉動的離心力把料撒出去,但只有半邊有孔,這樣可以控制撒出去的方向,防止漏料。
2 控制系統的組成及設計
基于的89C51單片機在電機PWM控制中的應用。精確的電機控制包括三部分,即控制,驅動,反饋。根據驅動信號PWM脈沖的產生過程,一般分為由單片機通過軟件編程產生PWM脈沖和通過定時計數器等脈沖發生器 產生PWM脈沖,本文將對這兩種方式進行介紹。
2.1 電機的驅動
方案一:
由單片機通過軟件編程產生PWM脈沖。關鍵是產生一定頻率占空比可調PWM 脈沖,這里可以用單片機的定時器T0與軟件結合的方法。T0工作在方式1,即十六位計數器方式。對TL0置初值FFD6H,使定時器0每隔41微妙(12MHZ晶振)溢出中斷一次,中斷后重置初值,并使軟件計數器SUB—DIV的值減1。SUB—DIV的初值為244,當此值減為0時,歷經的時間為 244×41×10-6 =0.010004秒,SUB-DIV
的初值為244(11110100B),SUB-DIV的低三位可以構成8種狀態.在0.01秒內8種狀態的重復次數=11110B
=30。故把低3位的狀態以某種形式組合起來,就可以形成一定占空比的3KHZ的PWM
基金項目:陜西省教育廳項目(2004JC07)資助、陜西科技大學創新基金資助
SUB-DIV.1 ORL SUB-DIV.2 形成占空比為12.5% --
SUB-DIV.0 ANL SUB-DIV.1 形成占空比25%
SUB-DIV.0 ORL SUB-DIV.1 ANL SUB-DIV.2 形成占空比為37.5%
SUB-DIV.0 形成占空比50%
SUB-DIV.1 ANL SUB-DIV.0 ORL SUB-DIV.2 形成占空比為62.5%
SUB-DIV.1 ORL SUB.DIV.2 形成占空比為75%
SUB-DIV.0 ORL SUB-DIV.1 OR SUB-DIV.2 形成占空比為87.5%
SUB-DIV位如下圖: (上面位的運算結果為1)
7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
× | × | × | × | × | 0 | 0 | 0 |
× | × | × | × | × | 0 | 0 | 1 |
× | × | × | × | × | 0 | 1 | 0 |
× | × | × | × | × | 0 | 1 | 1 |
× | × | × | × | × | 1 | 0 | 0 |
× | × | × | × | × | 1 | 0 | 1 |
× | × | × | × | × | 1 | 1 | 0 |
× | × | × | × | × | 1 | 1 | 1 |
我們可以看出SUB-DIV的低三位不同組合形成的占空比的個數=23 –1,所以N位的組合形成占空比的個數=2N-1.同時通過改變計數器T0的初值與軟件計數器的值來產生不同頻率的脈沖.這也就達到用單片機產生PWM脈沖的目的(頻率范圍從幾HZ到幾十KHZ。.它一般用于對電機的粗略調檔控制。
方案二:
選用可編程芯片8253的計數器0作為PWM信號發生器,8253的計數器0工作在可編程單穩態方式,它的輸出口產生寬度連續可調PWM脈沖,該輸出脈沖寬度為:W=N/fi;輸出的占空比為:G=fGATE×N/fi; 式中,W為輸出脈沖寬度,單位是秒;G為占空比;fi為計數器時鐘信號的頻率;N為單片機為其置入的計數值。PWM的頻率由GATE0上所加的信號頻率決定;在計數器0的GATE0端輸入一定頻率的方波(頻率值由PWM功放電路功放管的參數決定),該頻率一般由555構成多諧振蕩器產生。所以通過改變計數器值N來產生連續可調的PWM脈沖。由于它的頻率是由 555產生的,所以頻率范圍很廣,脈沖占空比連續可調,一般用于對電機的精確控制。
本系統采用由單片機通過軟件編程產生PWM脈沖
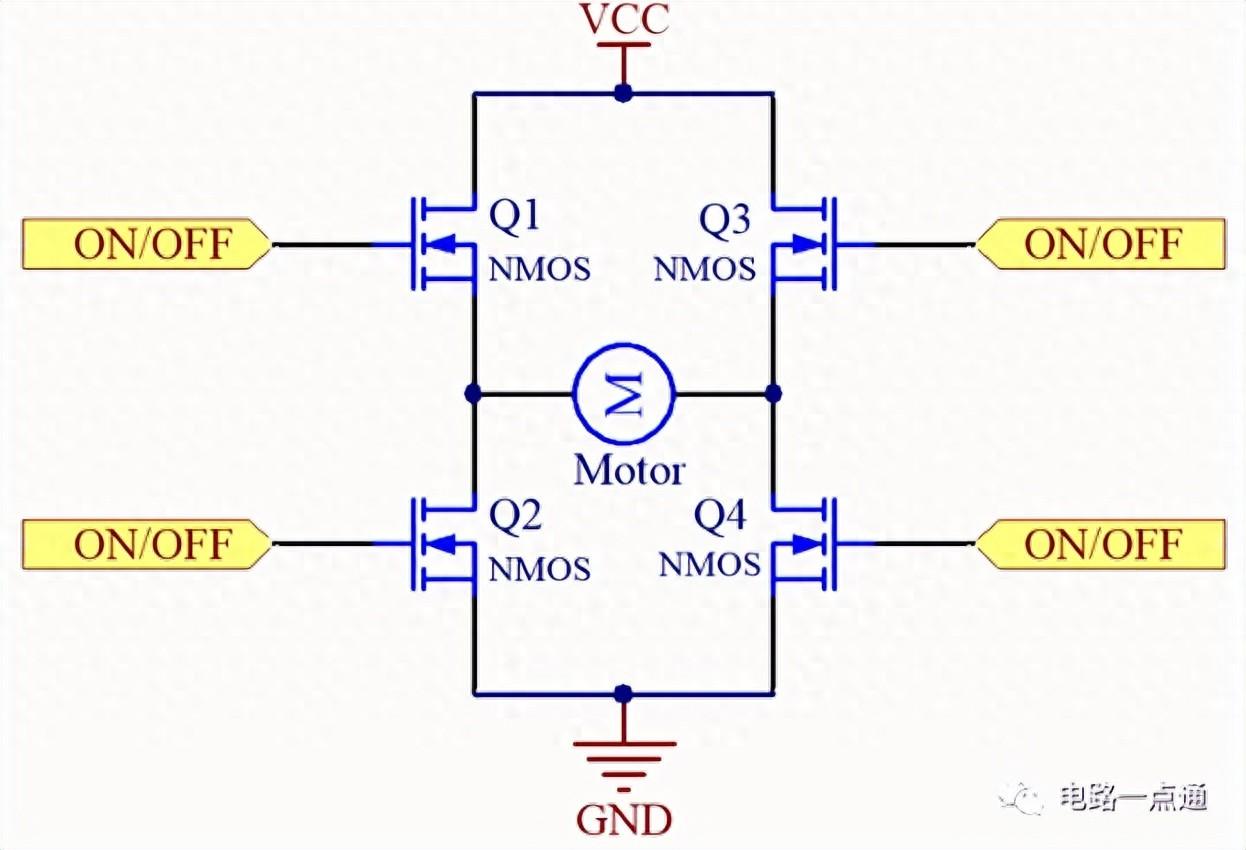
2.2 PWM功率放大電路
最常用的PWM功率放大器是橋式功放電路,又稱H型功放電路。圖一中的晶體管T1,T2,T3,T4組成PWM的開關功放電路,晶體管T1,T4 和T2 ,T3 配對工作。T1 ,T4導通,T2 ,T3截止;反之,T1 ,T4導通,T2,T3截止。顯然T1和T3,T2和T4不能同時導通,因此,T1,T4與T2,T3上所加脈沖頻率相同,方向相反。如果T1T4導通時間比T 2T3導通時間長,則電機正轉,反之電機反轉。所以我們可以把從上面產生的PWM脈沖信號,經過反向和延時后變成兩路互補的PWM1,PWM2輸出至功放電路 的輸入端。由于脈沖電平轉換的延遲,可能出現T1T3同時導通的情況,以至于引起短路。解決的辦法是通過軟件或延時電路使T1 T3同時有很短的一段時間TW的截止(死區)。這里是用一片雙路單穩集成芯片74HC221構成的延時電路。
現在市面上已有各種電機功放電路芯片,例如由美國半導體公司生產的LMD18245芯片,專用于直流或步進式電機的驅動。電源電壓范圍 12V~55V,額定電流3A,具有電流反饋控制電路及過流保護防止對管導通的功,PWM單雙極性可選,控制電平與TTL,CMOS兼容。雙H橋功率集成電路L298,其輸出最大電流達4A,支持最大的PWM頻率為50KHZ,具有過熱和過流保護功能,用于伺服直流電機。
2.3 電機的反饋通道
電機的反饋通道是指從光電編碼器或其他的電機速度,位置等傳感器的輸出到單片機之間的信號處理電路。
① 位置的檢測:光電編碼器是一種電機位置反饋元件,它可以分為絕對與相對編碼器,這里僅介紹后者。相對編碼器的輸出一般有3根或6根信號線,輸出信號為相位相差90°的串行脈沖信號A,B或A+,A-,B+,B-;碼盤每轉一圈輸出一個脈沖Z,或Z-,Z+。6根信號線的輸出為差分信號,具有傳輸距離遠,抗干擾能力強的特點。在與計算機系統接口時,必須對其進行合成,MC3486就是一種差分信號接受器,一片上有四個接受通道,每個通道上A,B是輸入,分別接A+,A-,Y是輸出。
② 速度的檢測:可以用電機內的磁電式碼盤(IE2-128)實現速度的檢測。IE2-128碼盤有128線,2通道方波脈沖輸出,TTL電平,相位相差90°。另一種方法是利用霍爾傳感器,在電機輪上安裝6組磁鋼,每轉一圈,霍爾元件產生6個脈沖,并對其進行計數,10秒內的計數值即為電機轉速r/min。
③ 倍頻及鑒相電路:倍頻也叫細分,用于提高編碼器的分辨率。對于方波脈沖可以采用簡單的四倍頻電路進行倍頻和鑒相。
④ 說明:本系統由于為電機的粗略控制,無需反饋通道。
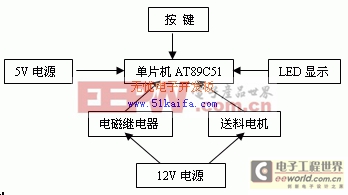
2.4 系統結構圖
3 系統工作原理及使用說明
本產品使用說明:該電路即可按照系統默認的時間參數運行,也可由用戶設定,通過按鍵設定新的時間參數,還可以調節電機速度。電路運行后,能自動周期性的控制送氧泵的通與停,以及電機送料。
本產品有三個按鍵,其一為功能鍵,其二為循環減1鍵,其三為電機調速鍵;
使用方法:先按一下功能鍵,LED顯示常通個位(按一下循環減1鍵,常通個位減1,當為0時按一下變9);第二次按一下功能鍵,LED顯示常通十位(按一下循環減1鍵,常通十位減1,當為0時按一下變9);第三次按一下功能鍵,LED顯示常關個位(按一下循環減1鍵,常關個位減1,當為0時按一下變 9);第四次按一下功能鍵,LED顯示常關十位(按一下循環減1鍵,常關十位減1,當為0時按一下變9);第五次按一下功能鍵,按第三個鍵調節電機轉速,本系統有7擋可調(0,1,2,3,4,5,6);第六次按一下功能鍵,系統將安新的時間參數運行,將安新的速度參數運行。系統默認的常通時間為20分鐘,常關時間為15分鐘,電機轉速為第3擋,最長常通時間為100分鐘,最長常關時間為100分鐘,系統上電復位后,電機送料1分鐘,電機送料周期=(常通時間+常關時間)*5,系統默認的送料周期為35*5=175分鐘。LED的小數點閃爍顯示秒。在設置常通,常關,電機轉速時,都有相應發光二極管亮。
另外還有手動復位鍵,當程序跑飛時,可以按這個鍵,使程序復位。還有手動關閉電機鍵。送料量可通過調節電機轉速來定,一般情況下轉速高,送料多。
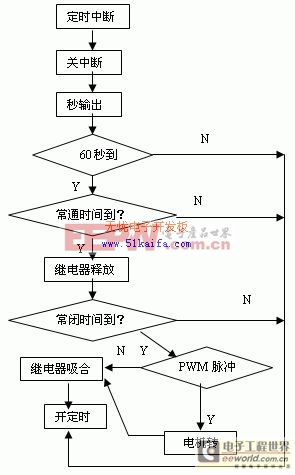
程序流程圖

4 結束語
本系統創新點在于利用單片機與電機PWM控制自動送氧送料系統,實現了自動的定時送氧,定時定量送料。對于家庭喂養的水族類:操作簡單,定時、自動送氧,送料、送料量可以控制,可方便于短時間外出旅游。餐飲喂養的水族類:可以晝夜喂養,定時定量,科學喂養,有利于水族類生長,降低成本,提高經濟效益。
參考文獻
[1] 屈印,沈為群,宋子善. 基于專用PWM控制器的直流伺服位置系統. 微計算機信息:2005.8-1期, P. 96-97
[2] 李華. 系列單片機實用接口技術. 北京航空航天大學出版社,1993
[3] 蘇開才. 現代功率電子技術. 北京:國防科技大學出版社,1995
[4] 沙占友. 單片機外圍電路. 北京:電子工業出版社,2003
[5] 張崇巍,張興. PWM整流器及其控制策. 北京:機械工業出版社,2003

霍爾傳感器相關文章:霍爾傳感器工作原理
pwm相關文章:pwm原理
塵埃粒子計數器相關文章:塵埃粒子計數器原理 霍爾傳感器相關文章:霍爾傳感器原理 加速度計相關文章:加速度計原理 脈沖點火器相關文章:脈沖點火器原理









評論