電動小車的電機驅動及控制

一個電動小車整體的運行性能,首先取決于它的電池系統和電機驅動系統。 電動小車的驅動系統一般由控制器、功率變換器及電動機三個主要部分組成。電動小車的驅動不但要求電機驅動系統具有高轉矩重量比、寬調速范圍、高可靠性,而且電機的轉矩-轉速特性受電源功 率的影響,這就要求驅動具有盡可能寬的高效率區。我們所使用的電機一般為 直流電機,主要用到永磁直流電機、伺服電機及步進電機三種。直流電機的控制很簡單,性能出眾,直流電源也容易實現。本文即主要介紹這種直流電機的驅動及控制。
1.H 型橋式驅動電路
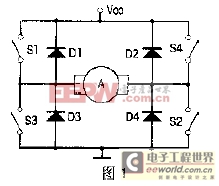
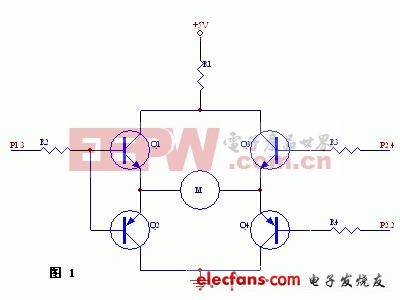
直流電機驅動電路使用最廣泛的就是H型全橋式電路,這種驅動電路可以很方便實現直流電機的四象限運行,分別對應正轉、正轉制動、反轉、反轉制動。 它的基本原理圖如圖1所示。
全橋式驅動電路的4只開關管都工作在斬波狀態,S1、S2為一組,S3、S4 為另一組,兩組的狀態互補,一組導通則另一組必須關斷。當S1、S2導通時,S3、 S4關斷,電機兩端加正向電壓,可以實 現電機的正轉或反轉制動;當S3、S4導 通時,S1、S2關斷,電機兩端為反向電 壓,電機反轉或正轉制動。
在小車動作的過程中,我們要不斷地使電機在四個象限之間切換,即在正轉和反轉之間切換,也就是在S1、S2導 通且S3、S4關斷,到S1、S2關斷且S3、 S4導通,這兩種狀態之間轉換。在這種情況下,理論上要求兩組控制信號完全 互補,但是,由于實際的開關器件都存在 開通和關斷時間,絕對的互補控制邏輯必然導致上下橋臂直通短路,比如在上 橋臂關斷的過程中,下橋臂導通了。這個過程可用圖2說明。
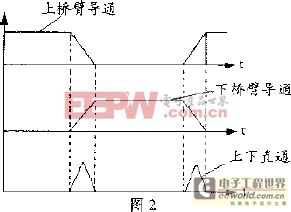
因此,為了避免直通 短路且保證各個開關管動作之間的協同 性和同步性,兩組控制信號在理論上要 求互為倒相的邏輯關系,而實際上卻必須相差一個足夠的死區時間,這個矯正過程既可以通過硬件實現,即在上下橋 臂的兩組控制信號之間增加延時,也可 以通過軟件實現(具體方法參看后文)。
驅動電流不僅可以通過主開關管流通,而且還可以通過續流二極管流通。當電機處于制動狀態時,電機便工作在發電狀態,轉子電流必須通過續流二極管流通,否則電機就會發熱,嚴重時燒毀。
開關管的選擇對驅動電路的影響很大,開關管的選擇宜遵循以下原則:
(1)由于驅動電路是功率輸出,要求開關管輸出功率較大;
(2)開關管的開通 和關斷時間應盡可能小;
(3)小車使用的電源電壓不高,因此開關管的飽和壓降應該盡量低。
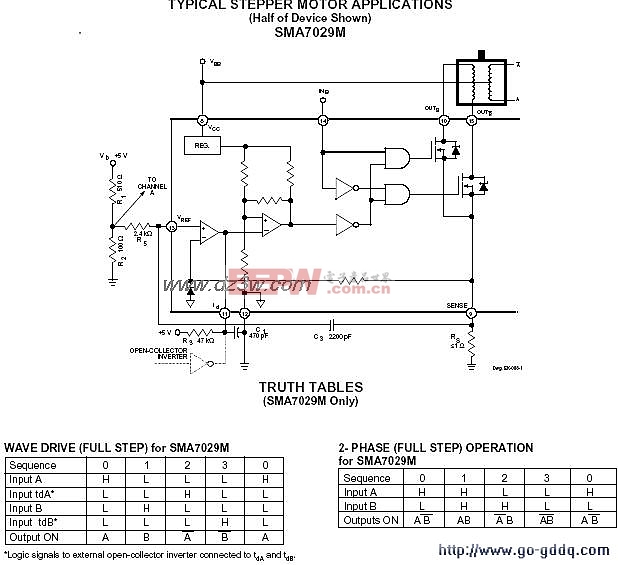
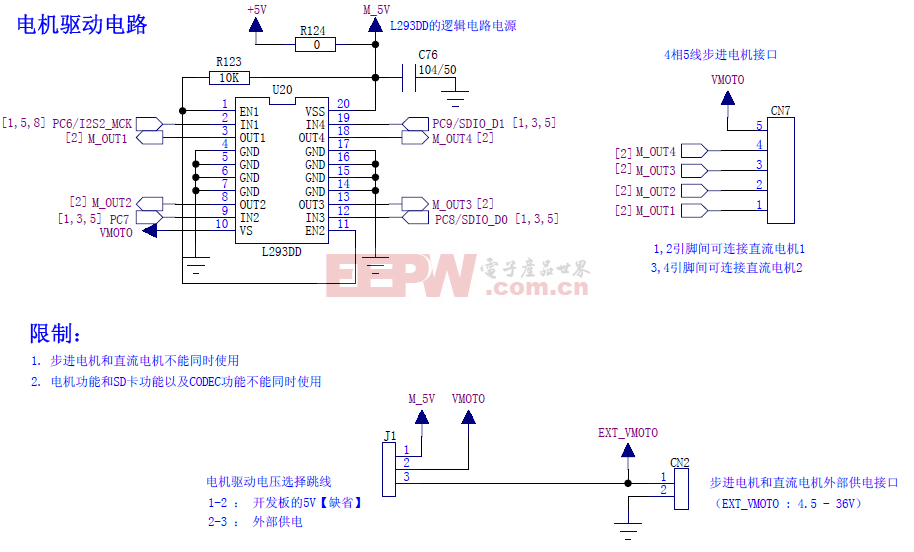
在實際制作中,我們選用大功率達林頓管TIP122或場效應管IRF530,效果都還不錯,為了使電路簡化,建議使用集成有橋式電路的電機專用驅動芯片,如L298、LMD18200,性能比較穩定可靠。





評論