基于I2C和雙ARM的PCB鉆床控制器設計

1.引言
印刷電路板鉆床是印刷電路板生產中的重要裝備,隨著電子產品加工要求的提高,低檔的基于單片機的PCB 鉆床控制器已經很難滿足要求。ARM7TDMI 是20 世紀末ARM 公司提出的一種32 位的RISC 微控制器結構, 基于該內核的芯片種類豐富,具有運行速度高,功耗小和價格低的特點。本文介紹了一種基于雙ARM 結構的PCB 鉆床控制器,它既解決傳統低檔鉆床控制系統性能不高的缺點,同時又具有很高的經濟性,是高檔PCB 鉆床理想的控制器。
數控系統按結構分,一般有單 CPU 和多CPU 之分[5]。單CPU 一般采用集中控制分時處理的方式完成數控系統的各項任務。它具有結構緊湊的特點,但是功能相對比較簡單。多CPU 結構的數控系統采用多CPU 并行處理,可以使系統達到更高的性能。多CPU 一般采用共享總線或共享存儲器方式進行通信。鉆床控制器的控制對象比較復雜:需要控制4套松下MINAS交流伺服系統,4個主軸電機以及9路開關量輸入,11路繼電器輸出。如果控制器采用單CPU結構,控制器需要擴展較多硬件,增加系統成本,降低了系統可靠性;如果控制器采用雙CPU結構,控制器可以根據功能進行分層設計:將信息處理量大的人機交互系統任務交由一個CPU負責,而機床運動控制交由另一個CPU來處理。這樣減少了外擴硬件的數量,降低了成本,提高了可靠性。具體是指:控制器用三星公司生產的S3C44B0X作為人機交互系統的CPU,用飛利浦公司生產的LPC2214作為機床運動控制系統的CPU。
2.控制器的硬件設計
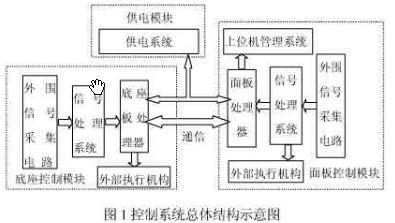
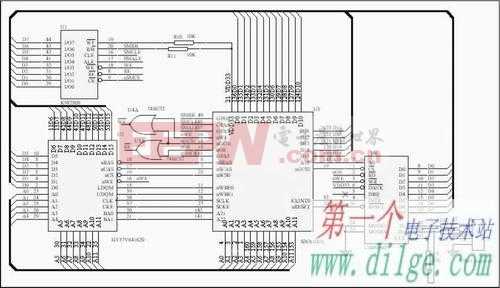
控制器由系統板和接口板組成:系統板是由LPC2214 和S3C44B0X 及其相關外圍電路構成的,是控制器的核心;接口電路板主要負責系統板和機床電器之間的驅動,電平匹配。系統的硬件結構參考圖1。
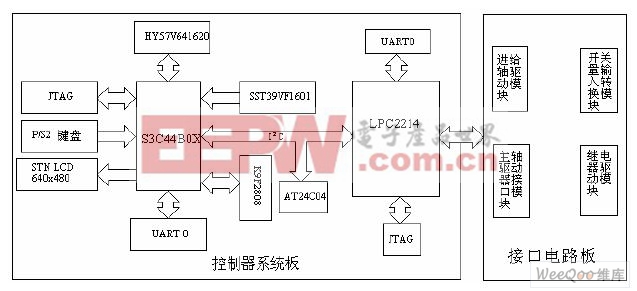
圖1 控制器硬件結構圖
2.1 控制器系統板硬件設計
控制器系統板由兩個子系統組成:人機交互系統和機床運動控制系統。人機交互系統和機床運動控制系統通過I2C 總線進行數據交換。I2C 總線是飛利浦公司提出的串行總線,具有速度較高,硬件連接十分簡單,無需增加硬件的特點。
2.1.1 控制器人機交互系統的硬件設計
控制器人機交互系統采用 S3C44B0X 為核心,擴展一系列硬件,構成一個具有完善的人機交互功能的系統。系統擴展了一片具有16 位數據寬度,2MB 的存儲空間的NOR 型Flash 存儲器芯片SST39VF1601 作為系統程序存儲器。為了提高系統程序的執行速度,我們擴展了一片1M*4Bank*16I/O 的HY57V641620 型SDRAM。系統一上電,系統初始化程序就把SST39VF1601 中存儲的系統程序拷貝到HY57V641620 中,同時,系統程序的數據存儲區也在HY57V641620 中,這樣系統程序可以完全在SDRAM 中運行。為了保證機床鉆孔文件在機床停電后仍然能夠保存,系統擴展了一片16MB NandFlash 芯片K9F2808 作為系統的電子硬盤。由于S3C44B0X 自帶液晶顯示控制器,所以系統選用三菱公司生產的不帶液晶顯示控制器的STN 型256 色640x480 像素的EDMGRB8KHF 液晶顯示模塊作為機床信息的輸出。系統操作信息的輸入采用PS/2 鍵盤。系統通過RS232 串口從PC 機上下載鉆孔文件。為了方便系統調試程序,人機交互系統設計了一個JTAG 口。
機床的一些重要的參數例如像機床進給軸絲杠的螺距,交流伺服系統的脈沖當量等數據需要永久保存,所以系統擴展了一片512B 的基于I2C 總線的EEPROM 芯片AT24C04 。機床人機交互系統電路結構如圖1 控制器系統板中以S3C44B0X 為中心的硬件結構。
2.1.2 機床運動控制系統硬件設計
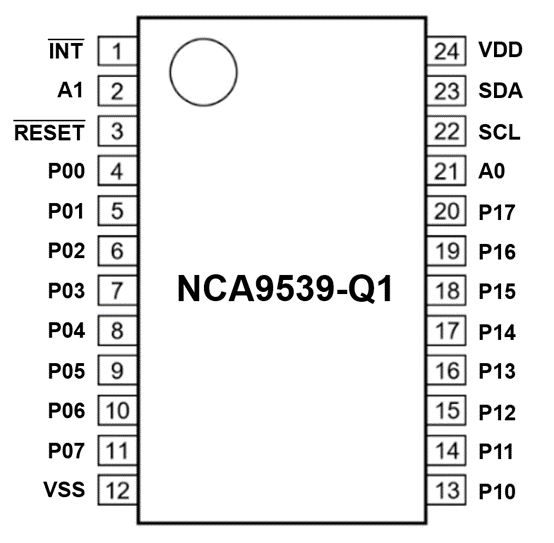
機床運動控制系統的核心是 LPC2214 微控制器。LPC2214 內部自帶256KB 的flash存儲器和16KB 的SRAM,無需外擴程序存儲器和數據存儲器。系統設計了一個RS232串口,用于LPC2214 系統程序的ISP 下載。為了便于調試程序,運動控制系統設計了一個JTAG 口。機床運動控制系統電路結構如圖1 控制器系統板中以LPC2214 為中心的硬件結構。機床電器都通過接口電路直接與LPC2214 相連。其引腳分配如下所示:

2.1.3 人機交互系統和機床運動控制系統的通信
數控系統的加工指令經過S3C44B0X 的處理后要傳給LPC2214 進行執行,而LPC2214執行的結果要返回給S3C44B0X 進行處理和顯示。系統采用I2C 總線進行通信。S3C44B0X工作在主器件模式,而AT24C04 和LPC2214 工作在從模式。AT24C04 的從地址是0xa0,LPC2214 的從地址是0x50,I2C 的速率


評論