用PIC18F458 的CAN 模塊實現CAN 總線通信

CAN(Controller Area Network)即控制器區域網,是一種主要用于各種設備監測及控制的網絡。CAN 具有獨特的設計思想, 良好的功能特征和極高的可靠性,現場抗干擾能力強。其在國內外工業控制領域已經被廣泛應用, 成為最有發展前途的現場總線之一。
美國微芯公司的PIC18F458 單片機集成了CAN 通信接口,執行Bosch 公司的CAN2.0A/B 協議。它能支持CAN1.2、CAN2.0A、CAN2.0B 協議的舊版本和CAN2.0B現行版本。使用PIC18F458 單片機的嵌入式系統, 可以很方便的利用CAN 總線與外界進行數據交換。它的優點是電路接口比較簡單,只需很少的外圍電路就可實現CAN 通信, 受硬件限制比較少;軟件編程容易實現所需功能, 只需對相關寄存器進行正確設置即可。
1 硬件接口電路
PIC18F458 與CAN 驅動芯片PCA82C250T 的接口電路如圖1 所示。PCA82C250T 是驅動CAN 控制器和物理總線間的接口, 提供對總線的差動發送和接收功能。電阻R 作為CAN 終端的匹配電阻;電感L 起濾波作用。
2 CAN 控制器的操作
2.1 初始化CAN 控制
在使用CAN 之前, 必須對它的一些內部寄存器進行設置, 如CAN 控制寄存器CANCON 、波特率寄存器BRGCONx 的設置以及對郵箱進行初始化。
波特率寄存器BRGCONx(x=1,2, 3)決定了CAN 控制器的波特率、采樣次數、同步跳轉寬度和重同步方式,對波特率寄存器的配置步驟如下:
- 設置CANCON 寄存器中的C A N 操作方式請求位為1xx,即REQOP=1xx;
- 判斷CANSTAT 寄存器中的操作方式狀態位是否為100,即OPMODE 是否為100,如OPMODE=100 則進入下一步;
- 設置BRGCONx(x=1,2,3)寄存器,即配置正確的波特率, 同步跳轉寬度、采樣次數和重同步方式;
- 設置發送郵箱和接收郵箱的標識符、郵箱數據長度、屏蔽寄存器、濾波寄存器以及初始化郵箱的數據區;
- 設置CANCON 寄存器中的CAN 操作方式請求位為000,即REQOP=000,使CAN 模塊進入正常工作方式;
- 判斷CANSTAT 寄存器中的操作方式狀態位是否為000,即OPMODE 是否為000,如OPMODE=000 則進入下一步;
- 寄存器配置和郵箱初始化完成后,進入正常工作方式。
初始化流程圖如圖2 所示。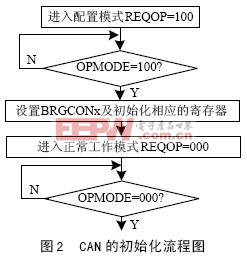
2.2 信息的發送
PIC18F458 有3 個發送郵箱緩沖器,每一個發送緩沖器的數據長度可以設置為1 ~ 8 個字節長度, 信息發送的具體步驟如下:
① 初始化發送郵箱;
② 設置相應的發送請求位為1 ,即TXBxCON bits.TXREQ=1(x=1,2,3);
③ 若CAN 總線允許發送, 則啟動最高優先級信息的發送;
④ 若發送成功,則TXREQ 被清零,TXBxIF 被置1,如果中斷被使能, 則會產生中斷;
⑤ 若信息發送失敗,則TXREQ 保持為1 ,并置位相應的狀態標志。

評論