L297/L298芯片步進電機的單片機控制實現

L297另一個重要組成是由兩個PWM 斬波器來控制相繞組電流,實現恒流斬波控制以獲得良好的矩頻特性。圖3中,頻率f是由外接16腳的RC網絡決定的, 當R=10kΩ 時,f=1/0.69RC。當時鐘振蕩器脈沖使觸發器置1,電機繞組相電流上升,采樣電阻的R 上電壓上升到基準電壓Uref時,比較器翻轉,使觸發器復位,功率晶體管關斷,電流下降,這樣,觸發器輸出的是恒頻PWM信號,調制L297的輸出信號,繞組相電流峰值由Uref確定。CONTROL為高電平時,對A、B、C、D有控制作用;而為低電平時,則對INH1和INH2起控制作用,從而可對電動機轉向和轉矩進行控制。
L298芯片是一種高壓、大電流雙全橋式驅動器,其設計是為接受標準TTL邏輯電平信號和驅動電感負載的,例如繼電器、圓筒形線圈、直流電動機和步進電動機 具有兩抑制輸入來使器件不受輸入信號影響。每橋的三級管的射極是連接在一起的,相應外接線端可用來連接外設傳感電阻。
AT89C52通過串口經MAX232電平轉換之后與微機相連。接受上位機指令。向L297發出時鐘信號、正反轉信號、復位信號及使能控制等信號。電路中,電阻R13,R15用來調節斬波器電路的參考電壓,該電壓將與通過管腳13,14所反饋的電位的大小比較,來確定是否進行斬波控制,以達到控制電機繞組電流峰值。
4 軟件組成
在該電路中,將P1.0口設為電機開始按鈕,P1.1,P1.2,P1.3為速度選擇按鈕。速度由低到高,P1.4為電機停止按鈕。并設三檔速度的最高速度依次為500pps、1000pps、2000pps 。RXD,TXD 已由MAX232電平轉換接出串口。此外,步進電機其啟動,停止的頻率較低,一般在100-250Hz之間,而最高運行頻率要求較高。通常為1-3kHz,為使其在啟動、運行和停止整個過程中,這采用常用的離散辦法來逼近理想的近似梯形的升降速曲線,如圖5所示。
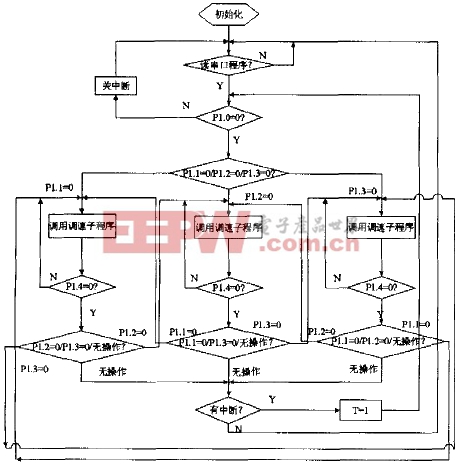
把各離散點的速度所需的裝載值用公式轉化為各自所需的定時時間固化在系統的ROM 中,這里用TH0=(65536-time)/256,TL0=(65536-time)%256來計算裝載值,time表示各階梯所需定時時間。該程序主要由控制主程序、加減速子程序組成,主程序框圖如圖4所示。
5 結論
本文創新點在于提出應用單片機和L297、L298集成電路構成步進電機控制驅動器。使之具有元件少。可靠性高、占空間少、裝配成本低等優點。另外,在上面提出的在加減速程序中定時器的裝載值用式子計算不精確,這兩條賦值要執行不少的時間。具體做的時候。可直接把初值計算出來或把除號用相加來計算。

pic相關文章:pic是什么
塵埃粒子計數器相關文章:塵埃粒子計數器原理 脈沖點火器相關文章:脈沖點火器原理




評論