基于can總線技術的電子控制系統單元在汽車網絡系統中的應用

本文采用了基于can總線技術,設計開發了應用于汽車網絡系統中的電子控制系統單元。
1 電子控制系統單元can通信模塊的設計
根據can通信原理,電子控制系統單元can通信模塊硬件主要由can控制器、can驅動器及中心微處理器構成。傳統的can通信模塊采用51系列的單片機作為中心處理器,sja1000作為can控制器,pca82c250作為can驅動器。這種方案所占空間大,外圍接口擴展局限,同時功耗高。本設計中,我們采用內嵌有can控制器的lpc2119和tja1050總線驅動器構成電子控制系統單元的can通信模塊。can通信模塊硬件圖如圖1所示。
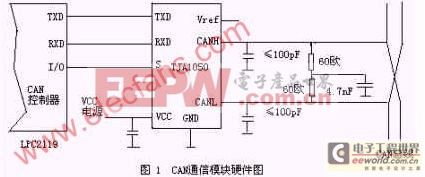
lpc2119內帶有arm7內核,具有封裝小、功耗低、多個32位定時器、4路10位adc、2路can以及多達9個外部中斷等優點。tja1050是philips公司生產的,用以替代pca82c250的高速can總線驅動器。該器件提供了can控制器與物理總線之間的接口以及對can總線的差動發送和接收功能。對于由"弱"終端構成的端節點,tja1050外圍的電阻和電容能改善系統的emc性能。實踐證明,采用lpc2119和tja1050構造can通信模塊,外圍擴展能力強,空間小,同時改進電磁輻射(eme)性能和抗電磁干擾(emi)性能。
2 電子控制系統單元控制模塊的設計
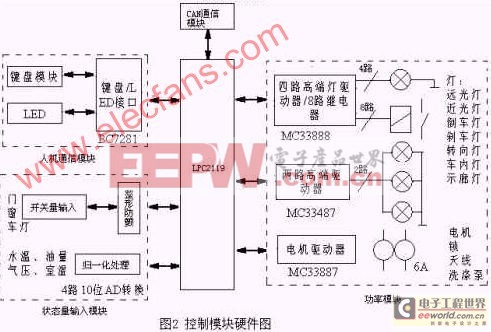
傳統的"蜘蛛網式"控制模塊,電路復雜,維修難度高。本設計中,我們采用功率模塊、人機通信模塊、狀態量輸入模塊的結合,構造出電子控制系統單元控制模塊,提高了整個系統的可觀性和實效性。控制模塊硬件圖如圖2所示。
2.1 功率模塊
考慮到汽車功率負載大及lpc2119的i/o口驅動的局限,系統中采用功率模塊作為中心微處理器與功率負載之間的橋梁。
設計中,我們采用摩托羅拉公司生產的mc33888功率器件控制遠光燈、近光燈、倒車燈、剎車燈。mc33888內部集成有四路高端燈驅動器和8路繼電器或發光二極管驅動器,是一個可控制網絡,具有在板診斷、與微控制器通信報錯能力及故障軟化等優點。考慮到車內燈和示廊燈的功率相對比較大,我們采用mc33487功率器件進行控制。mc33487內部集成兩路帶有電流感應的20毫歐姆高端驅動器,電流輸出4.5a.感性負載以及大電流的短路保護是整個設計的難點。mc33887具有功耗低、等待模式下電流25微安、輸出電流超過8安的短路關斷等優點,所以系統采用mc33887功率器件對電機、鎖、天線、洗滌泵進行控制。
2.2 人機通信模塊
為了提高駕駛員和乘客的舒適性、安全性,整個系統必須在人和機器之間建立良好的人機通信模塊。bc7281、鍵盤模塊及外圍的led之間的結合,構造出人機通信模塊。bc7281是比高公司推出的16位數碼管顯示及鍵盤接口專用芯片。該芯片通過外接移位寄存器(74hc164、74ls595等)可控制16位數碼管或者128只獨立的led。bc7281的驅動輸出極性及輸出時序均可通過軟件進行控制,從而和各種驅動電路配合,適合任何尺寸的數碼管。通過人機通信模塊,人的意識能夠為機器所識別,同時機器也可以將一些相應的狀態信息反饋到led或者lcd上,達到人機通信的可視化效果。

評論