PLC的PID運算及運動控制探討

對于運動控制,大家比較常用的包括步進電機、伺服電機,除此之外伺服閥、數字液壓等都屬于同一類的控制方式。在這些運控系統中,我們又根據控制對象的不同分為位置控制、速度控制、力矩控制三大類。其中步進電機只能應用于位置控制,而伺服則可以應用于這三類中的任一種控制方式。
在運動控制系統中我們一般可以使用專用的運動控制器或者PLC來實現運動控制功能,一般來說專用的運動控制器如數控系統等會更為專業功能更強,對于插補、G指令的支持會更好。
比方說高檔的數控系統可能會支持以下的功能:用戶用CAD畫完圖后轉換成G代碼下載給控制器,控制器就可以執行對應的G代碼完成整個控制過程。
而PLC相對而言是一個更為通用的控制平臺,一般通過功能塊來實現運動控制功能,V80增強系列(/S)對于兩軸的位置控制有很強的支撐,可以滿足絕大多數運動控制要求的環境,V80的速度控制和力矩控制一般使用E6MAD擴展模塊來實現,在這里我們提到的運動控制是CPU模塊本身的位置控制功能。
21.1、位置控制基礎
在裝備控制中有相當多的場合需要用到位置定位控制,如各種機床、收卷排線、紙張電纜管材的定長裁剪、包裝、印刷等。位置控制的實現,通常是通過步進電機和伺服電機來達到的,下面我們統一以步進電機來描述。
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。
PLC正是利用步進電機的這種特性來實現位置控制功能的,PLC與步進電機之間的接口為脈沖接口,我們稱之為PTO。
脈沖與位置的關系:
比方說我們需要步進電機轉動90度,而步進電機的步距角為0.3度的,那么我們的脈沖輸出個數就應該為300個,當300個脈沖輸出完畢后電機正好旋轉90度停止。
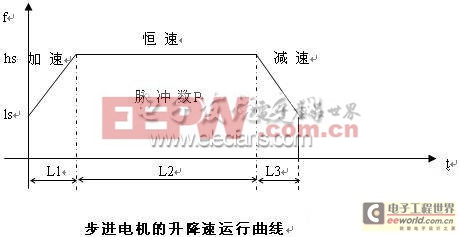
步進電機的啟動和加減速:
實際的應用中我們需要考慮到步進電機在帶載的情況下無法高速啟動,所以需要步進電機在啟動時使用較低的脈沖頻率,然后逐步提升速度,否則會有失步和過沖的現象出現。同時一般的步進電機使用場合都是開環的,一旦出現了失步和過沖則是不可恢復的誤差。(伺服電機這種情況要好一些但在負載太大的情況下仍然會有啟動不了的現象)
為了防止出現失步和過沖的情況,我們通常會讓步進電機在低速啟動后再逐步提升速度,在加速過程中,最好的是S型加速,S型加速的加速度是線性的,這對于機械和電機來說是最吻合其特性的。在實際的應用中,大多數是采用的線性加減速,這對于大多數的應用來說也是足夠了的。
步進電機的正反轉:
運控系統中的正反轉是很常用的方式,由于步進電機沒有帶反饋裝置,所以步進電機不適合高速的正反轉,一般而言,在空載的情況下行程在100個脈沖往反轉,步進電機的正反轉頻率只能達到10次/秒以下(大多數的在5次/秒以下),伺服電機的正反轉頻率可以達到50次/秒以下(剛性要調得比較高)。不同廠商的電機不同,主要與慣量的大小有關系。
正反轉時,需要很好的加減速控制的支持,否則會出現失步和過沖的情況,伺服系統還會出現還沒到位就開始反轉的情況。
在實際的應用之中我們還常用接近開關、光電開關、編碼器、光柵尺來與步進電機配合完成位置控制。這些方法中可以分為兩大類一類是開關型定位,一類是坐標定位。
開關型定位:
包括接近開關、光電開關、接觸開關等,這些開關最常用的是安置在原點,用來標零和消除累積誤差。這些系統在上電后一般都有找原點的動作過程,通常都是上電后向一個方向運動找到原點后標定原點坐標,然后開始正常工作。
坐標定位:
這一類的控制采用編碼器、光柵尺、電子尺(模擬電壓接口)之類的,其中又分為絕對編








評論