基于LSM303DLH集成傳感器的電子羅盤實現方法

電子羅盤是一種重要的導航工具,能實時提供移動物體的航向和姿態。隨著半導體工藝的進步和手機操作系統的發展,集成了越來越多傳感器的智能手機變得功能強大,很多手機上都實現了電子羅盤的功能。而基于電子羅盤的應用(如Android的Skymap)在各個軟件平臺上也流行起來。
要實現電子羅盤功能,需要一個檢測磁場的三軸磁力傳感器和一個三軸加速度傳感器。隨著微機械工藝的成熟,意法半導體推出將三軸磁力計和三軸加速計集成在一個封裝里的二合一傳感器模塊LSM303DLH,方便用戶在短時間內設計出成本低、性能高的電子羅盤。本文以LSM303DLH為例討論該器件的工作原理、技術參數和電子羅盤的實現方法。
1. 地磁場和航向角的背景知識
如圖1所示,地球的磁場象一個條形磁體一樣由磁南極指向磁北極。在磁極點處磁場和當地的水平面垂直,在赤道磁場和當地的水平面平行,所以在北半球磁場方向傾斜指向地面。用來衡量磁感應強度大小的單位是Tesla或者Gauss(1Tesla=10000Gauss)。隨著地理位置的不同,通常地磁場的強度是0.4-0.6 Gauss。需要注意的是,磁北極和地理上的北極并不重合,通常他們之間有11度左右的夾角。
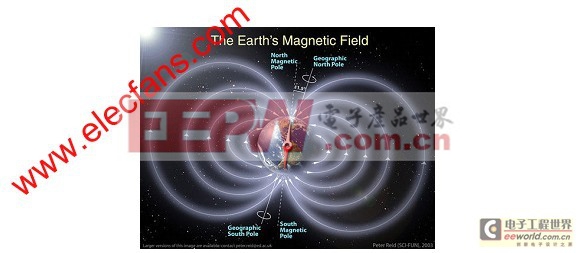
圖1 地磁場分布圖
地磁場是一個矢量,對于一個固定的地點來說,這個矢量可以被分解為兩個與當地水平面平行的分量和一個與當地水平面垂直的分量。如果保持電子羅盤和當地的水平面平行,那么羅盤中磁力計的三個軸就和這三個分量對應起來,如圖2所示。
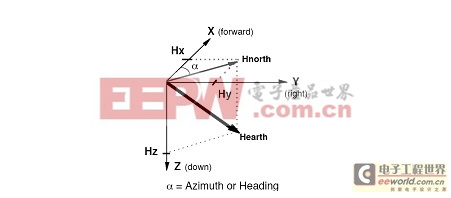
圖2 地磁場矢量分解示意圖
實際上對水平方向的兩個分量來說,他們的矢量和總是指向磁北的。羅盤中的航向角(Azimuth)就是當前方向和磁北的夾角。由于羅盤保持水平,只需要用磁力計水平方向兩軸(通常為X軸和Y軸)的檢測數據就可以用式1計算出航向角。當羅盤水平旋轉的時候,航向角在0o- 360o之間變化。

2.ST集成磁力計和加速計的傳感器模塊LSM303DLH
2.1 磁力計工作原理
在LSM303DLH中磁力計采用各向異性磁致電阻(Anisotropic Magneto-Resistance)材料來檢測空間中磁感應強度的大小。這種具有晶體結構的合金材料對外界的磁場很敏感,磁場的強弱變化會導致AMR自身電阻值發生變化。
在制造過程中,將一個強磁場加在AMR上使其在某一方向上磁化,建立起一個主磁域,與主磁域垂直的軸被稱為該AMR的敏感軸,如圖3所示。為了使測量結果以線性的方式變化,AMR材料上的金屬導線呈45o角傾斜排列,電流從這些導線上流過,如圖4所示。由初始的強磁場在AMR材料上建立起來的主磁域和電流的方向有45o的夾角。

傳感器相關文章:傳感器工作原理
電流變送器相關文章:電流變送器原理 加速度計相關文章:加速度計原理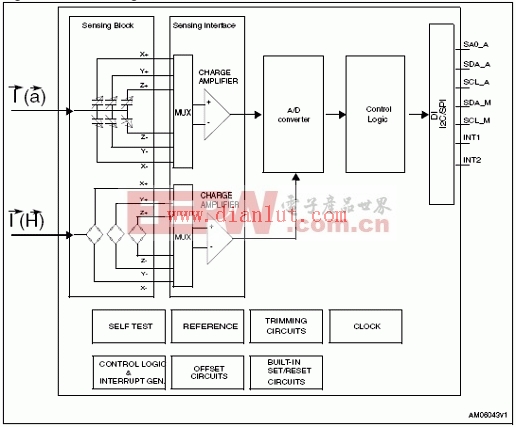




評論