自調節窗簾

介紹
自動調節窗簾會自動升高、降低、打開和關閉您的百葉窗。計算機終端充當遙控器,通過 RF 向窗簾廣播指令。這些手動調整與房間當前的環境光和溫度設置一起存儲在微控制器系統中。當在房間內找到這些照明和溫度條件時,窗簾會自動重新調整到之前的水平。
本文引用地址:http://www.j9360.com/article/202502/466751.htm高級設計
理由
我們的設計基于 Lutron 的 Sivoia 遮陽解決方案(在此處找到 youtube 視頻)。我們特別感興趣的 Lutron 系統功能是遠程功能和遮陽簾的自動功能。我們注意到,在窗簾內創建一個內存系統也可能是有利的,該系統將允許它記住用戶以前的設置并根據環境中的當前條件自動調整。此外,我們還創建了一個射頻裝置,將窗簾連接到計算機系統,該系統不僅能夠手動調整窗簾設置,還可以控制家中的整個系統。
背景數學
內存表組織
內存表中的節點是使用切比雪夫節點設置的。切比雪夫節點沿單位圓采用均勻的距離,使端點的點彼此更接近,而中間的點則更遠。我們之所以使用這種設計,是因為我們認為在中間范圍的陰影條件下比在極端范圍內有更多的容忍度。
切比雪夫節點由以下公式定義:對于 n+1 個節點,x_i = (a+b)/2 + (b-a)/2*cos((2*i+1)/(2*n+2)*pi),其中 (a,b) 是范圍,0 = i = n。為了確定輕節點,我們設置 n = 7(8 個節點)以獲得 0 到 255 之間的 9 個區域。為了獲得溫度節點,我們設置 n = 3(4 個節點)以獲得 100 到 180 之間的 5 個區域。我們選擇這些邊界點是因為,當房屋溫度低于 50 F 或高于 90 F 時,我們預計陰影設置不會發生變化。即使這些也可能是光照設置的情況,我們決定保留它們,因為引用的光照設置是基于光照的差異。
光的切比雪夫公式中的節點如下:
[2.4499 21.876 56.6648 102.6260 152.3740 198.3352 233.5124 252.5501]
溫度的切比雪夫公式中的節點如下:
[51.7127 63.8896 81.1104 93.2873]
這些節點被四舍五入為整數值,以節省內存使用量并使其更易于比較。
邏輯結構
我們的設計包含兩個 ATMEL Mega644 微控制器:一個用于控制計算機接口,另一個用于作窗簾。第一個 ATmega644 連接到計算機終端。Hyperterm 允許用戶向 MCU 輸入命令以發送和/或接收數據。然后,它們通過 RCT433 傳輸到另一個 MCU 上的接收器
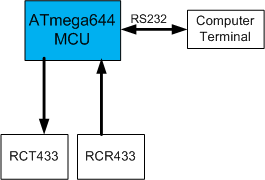
圖 2.計算機終端 MCU 設置
第二個 MCU 包含兩種作模式:自動和手動。在手動模式下,MCU 接收從第一個 MCU 傳輸的數據并處理指令,將窗簾移動到所需位置。當它沒有收到指令時,MCU 切換到自動模式,根據房間內的照明和溫度條件將百葉窗調整到用戶之前的設置。然后,MCU 向電機發送信號,使其旋轉正確的量以調整陰影。
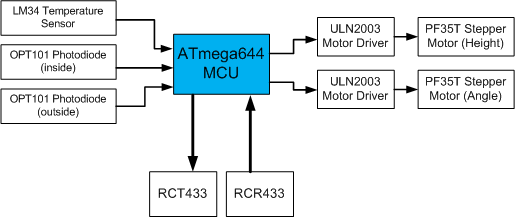
圖 3.窗簾 MCU 設置
這些設計的詳細原理圖可在附錄中找到。
硬件/軟件權衡
電機可以采用半步或全步配置驅動。半步是首選,因為它提供了更多的驅動力。不幸的是,這增加了功耗。由于功耗不是該項目的指標,因此這是提高弱步進電機強度的可接受解決方案。
百葉窗和擋板位置的分辨率必須與內存大小相平衡。該位置將針對特定配置存儲在表中。位置的大小為一個字節,允許 256 個可能的位置。如果位置的大小為 int,允許 65536 個位置,則將配置映射到可能位置所需的內存將增長大約是表長度的 256 倍。存儲可能的配置選項的表的長度由設置自動點所需的調整程度決定。為了對條件做出更精細的響應,需要更多的條目。雖然當前配置沒有充分利用數據空間,但它也提供了對條件的充分響應。
在討論實現第二個 UART 的方法時,ATMega644P 上的輔助硬件 UART 的解決方案被忽略了。雖然硬件解決方案更有利,但由于實現簡單,軟件 UART 允許對傳輸速率進行更精細的控制。為了降低由于波特率接近其規格而導致射頻發射器/接收器對發生故障的風險,可以選擇較低的波特率。由于定時器的性質,此波特率不需要通過硬件 USART 控制寄存器的分辨率進行量化(即不限于微控制器的有限波特率選擇)。由于 RF 通道的共享總線特性和沒有任何頻率多路復用,因此還需要半雙工通信。
由于各種中斷之間的交互,尤其是通過 RF 鏈路發送/接收數據的關鍵區域,電機更新中斷和軟件 UART 中斷的時序必須足夠長,以避免數據丟失。例如,軟件 UART 采樣率必須足夠長,以便電機中斷的延遲完成處理,因此在正確的時間一致地采樣位。此斷言將限制波特率,但由于波特率已經受到 RF 模塊的限制,因此可以安全地忽略此因素。
窗簾的可控性帶來了可用性的權衡。雖然應該讓用戶可以自由輸入任何任意的調整值,但高估調整值會導致陰影做出劇烈調整,用戶感到恐慌。從交互的角度來看,將調整范圍限制為常數可以讓用戶看到足夠的反饋,而不會削弱立即響應劇烈變化的能力。
現有專利
電動窗簾的概念在當前的節能策略中并不是什么新鮮事。專利 7389806 討論了一種電動窗簾和用于升高和降低窗簾的通信系統。電動窗簾的想法已經被 Lutron 和 Draper 等幾家公司實施。然而,這些公司都沒有實施允許窗簾獨立于人工控制運行的內存系統
硬件
RF 通信網絡
從一開始,該項目的目標之一就是提供一種與多個遠程設備連接的方法。用于此目的的最簡單的網絡拓撲之一是星形拓撲。
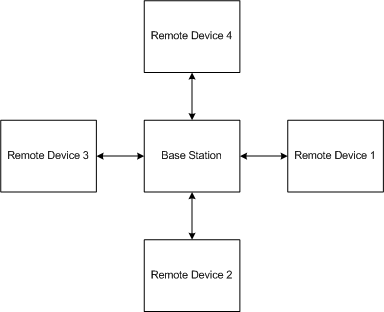
圖 4.射頻連接到基站
由于遠程設備之間缺乏交互,因此這種拓撲結構是合理的。基站控制所有遠程設備,因此它是網絡上最權威的節點,位于星形的中間。為了減輕基站的負載,從而減輕控制基站的網關設備(例如計算機)的負載,當基站正在接收時只有一個遠程設備在發射,而當基站正在發射時,所有遠程設備都在接收,這一斷言必須成立。RF 通信鏈路本質上是一條共享總線。因此,頻率多路復用(允許多個遠程設備與基站通信)對于本項目來說太復雜了。
圖 5.RF 發射器和接收器電路。
盲區移動
百葉窗使用 2 個 PF35T-48L 步進電機上下移動。電機使用 4N35 隔離器進行光隔離,并由 ULN2003A 達林頓陣列供電。使用步進電機是因為它們的準確性,因為預計百葉窗會根據用戶以前的偏好停在特定位置。它們都驅動一個齒輪,增加系統中的扭矩,從而可以平穩地調整窗簾。線軸用于卷起固定窗簾的繩子。滑輪用于重定向拉力,以便單個齒輪和桿能夠升高和降低陰影。該字符串穿過原始窗簾框架的孔,使其外觀看起來與普通窗簾完全一樣。
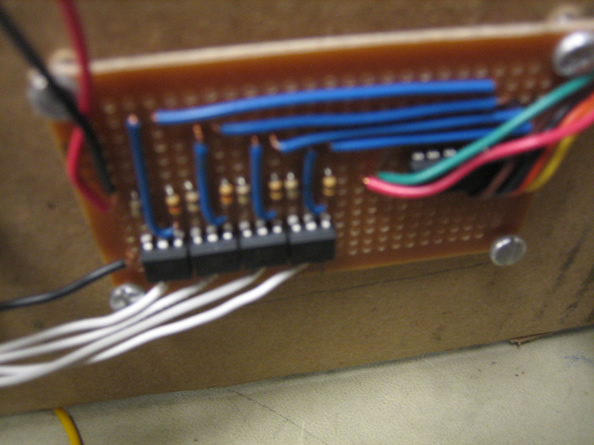
圖 6.光隔離器和達林頓陣列電路
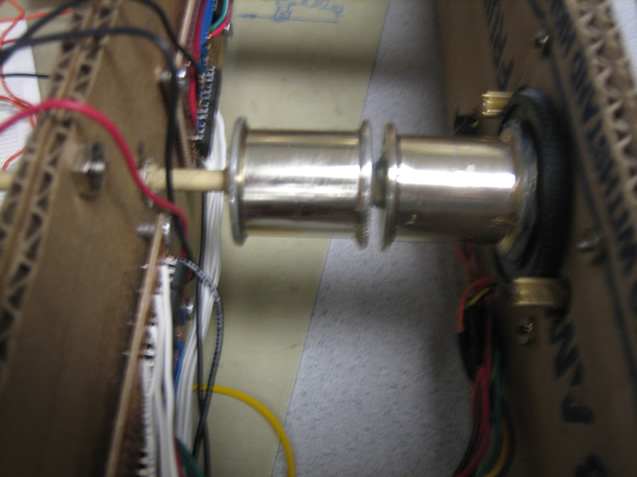
圖 7.用于升高和降低陰影的線軸。

圖 8.滑輪用于調整拉力的方向。
傳感器輸入
溫度輸入通過使用 LM34 傳感器(與實驗室 5 中使用的傳感器相同)完成。在進入 MCU 中的 ADC 之前,使用 LM358 將其放大增益 2 以獲得更高的精度。溫度傳感器輸入進入 MCU 的端口 A.0。然后根據 ADC 值計算當前室溫,并用于確定陰影的設置。
我們使用的光傳感器是 TI 的單片光電二極管和單電源跨阻放大器 OPT101。光輸出隨光強度線性增加。光電二極管有一個內部放大器,電阻為 1MO,當引腳 4 和 5 連接在一起時使用。由于這個放大器,我們可以將光電二極管的輸出直接插入 MCU 中的 ADC。光傳感器進入端口 A.1(傳感器內部)和 A.2(傳感器外部)。我們使用了來自 MCU 的 5V 穩壓輸入。在強光下,傳感器在電壓表上的讀數高達 4.27V,而在遮蓋時讀數為 .06V。
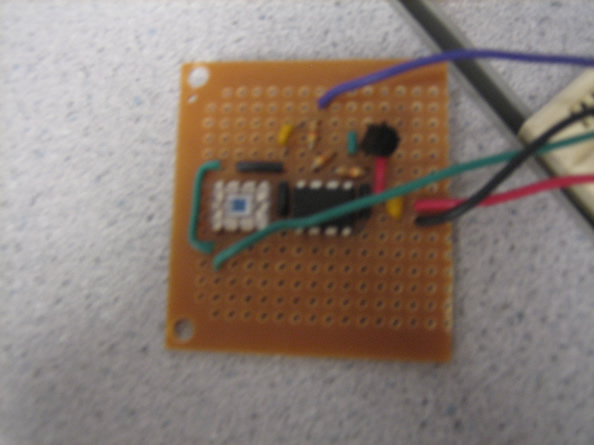
圖 9.內部傳感器電路。
硬件復雜功能
我們的第一個硬件復雜化問題來自拉起窗簾。我們創建了初始設計和測試代碼,以作電機來升高和降低窗簾的一側,而一個人則手動抬起另一側。我們很快意識到電機的強度不足以抬起它的陰涼處。然后,我們購買了滑輪并創建了一個滑輪系統來幫助抬起遮陽傘。這也失敗了,因為在電機不再有足夠的扭矩之前,陰影只上升了大約一半。最后,我們購買了一個齒輪,以顯著增加系統的扭矩。這提供了足夠的扭矩來抬起陰影。我們希望購買第二個齒輪來為陰影的另一側實施對稱系統,但我們無法找到另一個,因為供應商只有一個齒輪具有正確的齒。因此,我們連接了第二個電機并對其進行了測試,發現這提供了足夠的扭矩,可以用一個軸和齒輪抬起窗簾的兩側。
軟件
用于 RF 通信的輔助 UART
為了方便使用 RCR/T-433 進行通信,使用 UART 連接似乎尤為突出。遺憾的是,在基站上,硬件 UART 已經用于與網關設備通信。由于缺乏對替代微控制器(如 ATMega644P)的研究,并且預算有限,因此實施了中斷驅動的軟件 UART。雖然軟件解決方案的效率遠不如硬件解決方案,但它便宜、成本低,并且在概念上易于理解。
軟件實現大致基于 AVR304,它描述了使用定時器的半雙工中斷驅動 UART 和基于位拆解方法的外部中斷。正如 RF 網絡設計中所指出的,由于基帶頻率的共享性質,半雙工串行通信方法對于該項目來說是足夠且理想的。此實現的唯一硬件成本是使用兩個 GPIO 引腳。在軟件成本方面,使用了外部中斷和定時器。
軟件實現涉及通過多個控制狀態轉換軟件 UART。
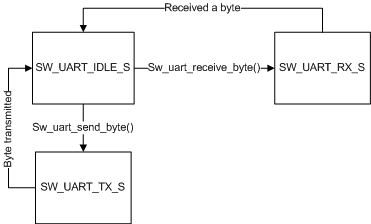
圖 10.軟件 UART 狀態機
SW_UART_IDLE_S 通道空閑或剛剛接收或發送了一個字節。
SW_UART_RX_S 通道被占用,等待接收字節。
SW_UART_TX_S 通道被占用,正在傳輸一個字節。
sw_uart_send_byte 激活一個定時器中斷,該中斷以波特率發送一個起始位(傳輸下降沿),后跟一個字節的數據和一個停止位(傳輸上升沿)。由于子例程僅啟用中斷,因此它是非阻塞的,并且可以在傳輸字節時執行其他作。傳輸完整字節后,通道是空閑的。
sw_uart_receive_byte 激活外部中斷以捕獲狀態位 (下降沿)。觸發中斷后,計時器開始以連接的波特率對傳入的數據流進行采樣。同樣,此 sub 例程僅啟用相關的 interrupts。它是非阻塞的,可以在未接收到字節時執行其他作。收到完整字節后,將釋放通道。捕獲字節后,接收到的數據將存儲到變量中。
RF 數據封裝
傳輸的幀由連續傳輸的 15 個字節組成。
| [0] | [1...4] | [5] | [6...13] | [14] |
|---|---|---|---|---|
| 0x00 | 同步序列 | 開始 | 編碼的有效負載 | 停 |
第一個字節(索引 0)是調整接收器增益和清除接收器捕獲的任何噪聲觸發的中斷字節所必需的。同步序列用于允許接收器將即將到來的幀確認為實際幀,而不是噪聲。起始字節用于向接收方發出信號,以便在后續字節捕獲期間開始存儲編碼的有效負載。最后,雖然項目中未使用停止字節,但它既可以用作終止符標記,也可以用作錯誤檢查。
必須對有效負載進行編碼才能提供 DC 規范化。在 Meghan Desai 完成工作之后,以下方案用于對有效負載進行編碼,有效負載字節首先發送有效字節最少。
| 啃 | 編碼字節 | 啃 | 編碼字節 | 啃 | 編碼字節 | 啃 | 編碼字節 |
|---|---|---|---|---|---|---|---|
| 0x0 | 0b10001011 | 0x4 | 編號:0b10010110 | 0x8 | 0b10100011 | 0xC | 0b10101100 |
| 0x1 | 編號 0b10001101 | 0x5 | 0b10011001 | 0x9 | 編號:0b10100101 | 0xD | 0b10110001 |
| 0x2 | 0b10010011 | 0x6 | 0b10011010 | 0xA | 編號:0b10100110 | 0xE | 0b10110010 |
| 0x3 | 編號 0b10010101 | 0x7 | 0b10011100 | 0xB | 編號:0b10101001 | 0xF | 0b10110100 |
有效載荷的格式可支持 254 臺設備,每臺設備有 254 個可能的傳感值/命令。發射器解碼的 payload 格式遵循此格式。
| [0] | [1] | [2] | [3] |
|---|---|---|---|
| 設備地址 | 命令 | 參數 1 | 參數 2 |
0x00保留在基站的地址空間和傳感器 ID 空間中以供確認。在自調節百葉窗的特定情況下,支持以下命令并從基站傳輸。
| 命令代碼 | 參數 1 | 參數 2 | 描述 |
|---|---|---|---|
| 'O' | 相對數量 | 不在乎 | 將翻蓋打開相對量。 |
| 'C' | 相對數量 | 不在乎 | 將擋板關閉相對量 |
| 'U' | 相對數量 | 不在乎 | 相對程度地提高盲注 |
| 'D' | 相對數量 | 不在乎 | 將盲注降低相對量 |
| 'A' | 絕對盲區 | 絕對翻蓋位置 | 將百葉窗定位到絕對盲板和翻蓋位置。 |
| 'R' | 傳感器 ID | 不在乎 | 使用傳感器 ID 輪詢傳感器以獲取值 |
相比之下,遠程設備僅傳輸以下有效負載格式。
| [0] | [1] | [2] | [3] |
|---|---|---|---|
| 0x00 | 遠程設備地址 | 傳感器 ID | 價值 |
對于非值返回作(如盲注調整),值 0x00 保留給傳感器 ID,“A”用作確認收到命令的值。對于值返回作(如“R”),傳感器 ID 對應于請求的信息,值是返回的值。故障檢測和錯誤處理(例如在超時時重新發送命令)由網關設備驅動程序處理。以下從基站到網關設備的信息編碼有助于這種交換。
| 法典 | 意義 |
|---|---|
| 'W' | 正在向遠程設備發送命令。 |
| 'D' | 完成命令處理 |
| 'F' | 處理命令時出錯。可能未被識別 |
| 自 | 對遠程設備的命令超時。未收到 ACK。 |
| Rxyz | x 為遠端設備地址,y 為信息 ID,z 為返回值。(0x00 保留給 y 用于確認沒有返回值的命令。z 將為 'A' 表示確認。 |
射頻通信鏈路控制
RF 控制組件有助于發送和接收整個數據包。RF 控制必須與串行通信保持非阻塞性,但由于在工程的其余部分大量使用中斷,因此將使用來自主 while 循環的非中斷驅動控制。通過此實現,必須斷言控制過程將被調用得足夠快,而不會錯過任何數據包。
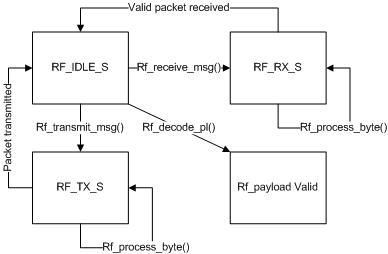
圖 11.射頻連接到基站
RF_IDLE_S RF 信道被清除或剛剛發送或接收到有效幀。
RF_TX_S RF 通道用于通過軟件 UART 爆破幀。
RF_RX_S RF 通道正在等待接收有效幀。
Rf_payload Valid ( Valid) 接收到的幀已經解碼完畢,rf_payload 變量中包含了解碼后的數據。
rf_transmit_msg() 對有效負載進行編碼并將其加載到傳輸緩沖區中。未啟用任何中斷,并且實際上不會處理該幀。
rf_receive_msg() 啟用軟件 UART 字節捕獲并重置接收幀緩沖區的條件。
rf_process_byte() 要么在準備好時從軟件 UART 中讀取字節,要么通過軟件 UART 傳輸字節。這將調用 sw_uart_receive_byte() 或 sw_uart_send_byte()。承認從接收到的字符串中處理一個字節與及時啟動軟件 UART 以捕獲下一個字節之間的爭用條件。但是,接收到的停止字節的停止位和同步序列的長度應提供足夠的時間,以便在任何編碼的有效負載數據丟失之前再次調用 process_byte()。
施加超時是為了處理遠程設備可能關閉或超出范圍的情況。基站在發送命令后等待確認消息。如果在超時持續時間內未收到確認,則會向網關發送錯誤消息。
電機控制
步進電機通過按順序給線圈通電來運行,以便轉動電樞并產生旋轉。在單步配置中,一次只有一個線圈通電。然而,在該項目中,步進電機被配置為以半步為增量轉動。以半步驅動電機提供額外的驅動功率,同時消耗更多的電力。此外,它還提供兩倍于全步配置的精度。用于驅動步進電機旋轉的順序如下圖所示。
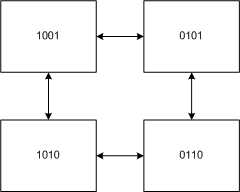
圖 12.步進電機狀態機
為了以特定速度驅動電機,使用了計時器。電機的轉動速率由步長(使用半步配置)的一半乘以計時器的頻率決定。增加頻率并更快地完成電機控制序列將導致更快的旋轉。以恒定速度驅動電機是平穩盲動的重要因素。因此,電機控制被降級為定時器,該定時器觸發中斷以每秒約 2 轉的速度改變電機輸出。電機中斷部分由當前電機輸出決定。為了確保實現平穩移動,在 timer 的單個周期內只能進行一次到相鄰狀態的轉換。
timer interrupt 通過縮放因子處理將步長轉換為位置。位置描述遮板的垂直位置或翻蓋的角度。位置的分辨率是陰影的高度除以 256(以一個字節表示)。縮放因子由移動一個位置所需的步驟數決定。通過仔細記賬,可以準確地保持絕對空間的位置。對陰影的調整僅限于這些位置,同時權衡內存大小和微調控制。完成每個位置的步數后,調整位置簿記并遞減調整變量。
定時器根據四個調整變量將電機連續調整到相鄰狀態:
adjup_pos 向上調整陰影
adjdown_pos 向下調整陰影
adjopen_pos 調整打開角度
adjclose_pos 調整閉合角度
通過將調整變量設置為非零正數,計時器將自動控制物理電機運動以完成調整,而不會阻止通信組件的任何控制。最初,使用兩個變量允許我們將走勢向上和向下排隊,這樣它就會在向下走勢之前完成所有向上的走勢(或在收盤前完成所有開倉)。然而,經過進一步考慮,這個理想似乎很新穎,并不是特別有用。因此,在設置調整變量時,互補調整(例如,設置 adjup_pos 時為 adjdown_pos)應歸零。在某個點將 configuration 存儲到內存中的能力比在 movement 結束時存儲位置更有利。
結果
執行速度
運行遮陽簾的電機是非阻塞的,可以隨時被手動命令覆蓋。輸入手動命令時,將擦除先前的命令并執行新命令。這非常適合快速和即時調整,當用戶可能希望停止自動調整陰影并將該點作為存儲值時。這也消除了以前的閃爍,該閃爍是由于陰影具有同時上下移動的命令而導致的,這會導致陰影著色并經常在旋轉中丟失步驟,從而降低陰影的準確性。現在只有一個命令,因此陰影沒有沖突的調整。
陰影的兩個調整都會閃爍,然后傳感器值會生成一個非常接近節點的值。這是因為節點處的數據連接不順暢,而是設置被分割成段。因此,如果傳感器值懸停在某個節點周圍,則當傳感器高于和低于時,它將嘗試在兩個范圍設置之間來回調整。電機不斷嘗試重新調整,但從未關閉。為了解決這個問題,我們需要為內存系統實現一種新的方法,也許使用雙線性插值函數并創建一條連續曲線。我們沒有實現這個內存模型的原因是實現 smooth 函數所需的計算。每個變量 (高度或角度) 的計算都需要 8 次乘法。這意味著我們在整個代碼中每個循環都需要 16 次乘法。
準確性
步進電機為系統提供了非常好的精度,使其能夠獲得窗簾水平的精確點。我們將陰影分成 255 個步驟,或陰影可以停止的位置。這些步驟中的每一個都需要一定的旋轉次數,這在 steps_per_position 中給出。當電機沒有足夠的扭矩來旋轉窗簾或打開百葉窗并且電機滑動或發出咔嗒聲時,窗簾精度的唯一缺陷就會出現。這種情況更多地發生在陰涼處頂部附近,此時電機必須舉起陰涼處的全部重量。發生這種情況時,臺階將被丟棄,并且陰影現在位于不正確的位置。為了解決這個問題,我們有一個 calibrate 函數,它將陰影一直帶到頂部(無需點擊或跳過),然后將位置重置為零。
安全
步進電機通常會大量發熱,因為運行電機需要大量的功率。為了解決這個問題,當電機不移動窗簾時,我們會關閉電機。我們通過向電機發送一個字節的低位來實現這一點,這意味著沒有電壓進入任何電機輸入。這不僅可以防止電機過熱,還可以降低功耗。除此之外,我們的窗簾與家中常見的另一種窗簾一樣安全。
干擾
發射機以 433 MHz 的頻率發出射頻信號。這將干擾以該頻率發射或接收的任何其他設備。我們的項目通過為每個接收器關聯一個地址來對干擾進行分類。如果存在多個遠程設備,則使用地址字節來確定哪些數據對該特定設備有用。任何不包含設備地址的信號都將被忽略。
可用性
我們的項目在現實世界中非常實用。盡管在每個窗口陰影中都有內存可能不是最好的情況(非常取決于位置和內存設計),但它在大多數情況下非常有用。整個設備安裝在一個小框架中,可以很容易地被窗簾覆蓋,就像普通的窗簾一樣。此工程可以應用于多個窗簾,以使用單個控制源控制所有窗簾。
另一個可用性功能是我們的計算機界面。如前所述,它不僅能夠處理到窗簾的傳輸,還能夠處理到任意數量的遠程設備的傳輸(只要有足夠的地址)。這意味著單個基站最多可以控制 256 個遠程設備。基站可以擴展以作照明、風扇和許多其他家用組件。
結論
期望值
我們很驚訝預算對我們的項目影響如此之大。最初,我們計劃使用太陽能和電池來實施窗簾,以使其更加環保。然而,經過一番研究,我們意識到,買得起能夠持續運行電機并同時為電池充電的電池和面板太昂貴了。因此,我們采用了典型的壁式插座電源。
我們在抬起和調整窗簾的極端點(將窗簾一直抬高或完全朝一個方向旋轉)時遇到了一些麻煩。然而,當我們嘗試使用功率較小的步進電機來創建內存系統時,我們預料到會遇到一些困難。最后,我們最好使用更堅固的電機,并使用更堅固的材料(如木材)設計我們的框架。但是,由于時間和資源限制,我們無法完成這些任務。
知識產權注意事項
產品唯一不是從頭開始創建的部分是窗簾本身。除了窗簾,我們用原材料制造了所有東西。
我們軟件 UART 的一部分代碼來自 Atmel 給出的基本代碼。除此之外,我們所有的代碼都是在我們小組內部自行編寫和設計的。
道德考慮
在整個項目中,我們盡最大努力維護 IEEE 道德準則,以創造一種安全且有用的產品來推動技術進步。我們在設計項目時高度重視公益和安全。在項目過程中,我們沒有遇到任何沖突。我們盡我們所能設計了這款產品的電路和布線。沒有賄賂案件,如果有,我們不會接受。我們采用了我們熟悉的技術,并嘗試以有用的方式將它們結合起來。我們不僅得到了 Land 教授和助教的幫助,還得到了一些以前參加過 ECE 476 的朋友的幫助。我們經常與其他團體或不同的種族、性別、宗教和其他各種不同的人討論他們的項目,并收到關于我們項目的反饋。
法律注意事項
我們以 433MHz 的速度傳輸,這在自由傳輸范圍內。除了傳輸之外,我們的窗簾還充當完全可作的普通手動窗簾。沒有其他法律問題需要考慮。
附錄
源代碼
程序文件
main.c
rfcomm.c
serial.c
softuart.c
stepper.c
uart.c
頭文件
main.h
ops.h
端口聲明.h
rfcomm.h
serial.h
softuart.h
步進器.h
uart.h
圖表
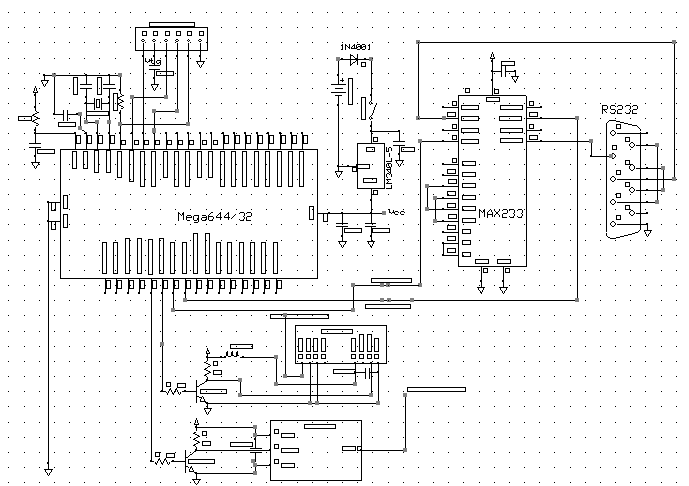
圖 13.Base Station Schematic 全尺寸 sch 文件
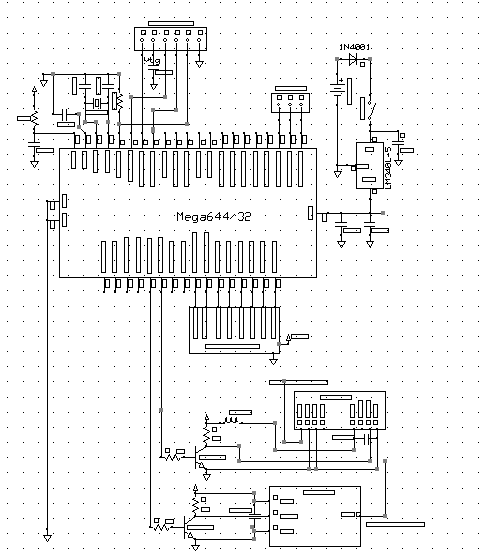
圖 14.遠程站原理圖全尺寸 sch 文件
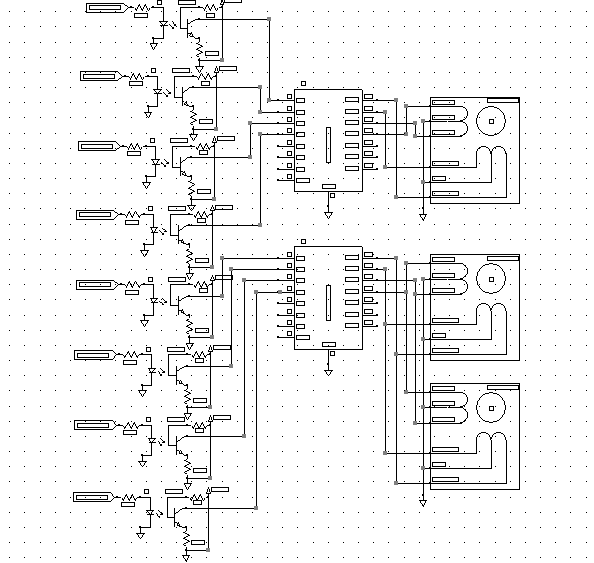
圖 15.Motor Driver Schematic 全尺寸 sch 文件
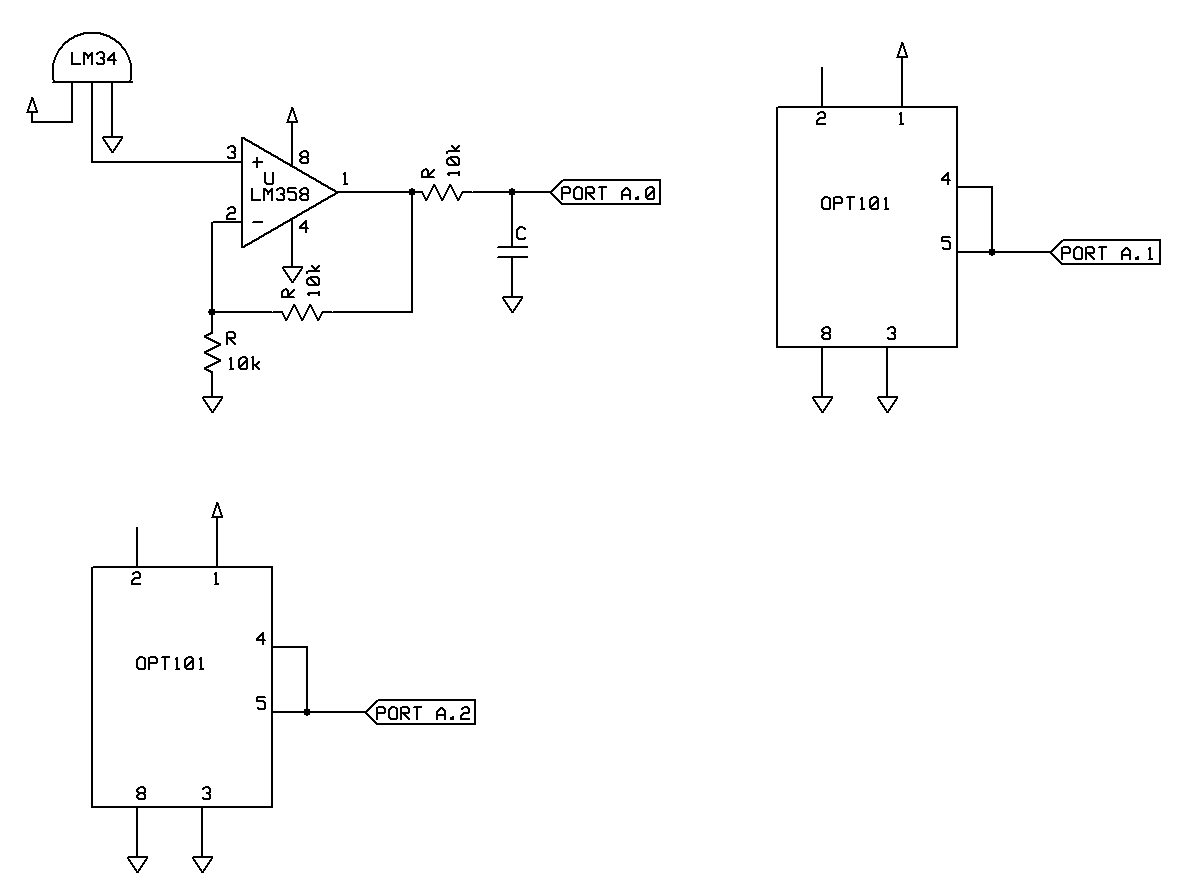
圖 16.傳感器原理圖 sch 文件
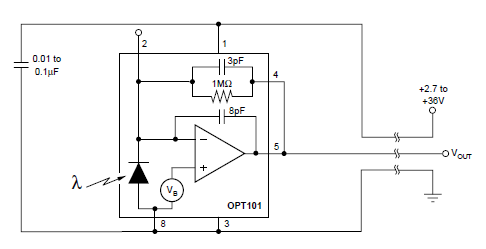
圖 17.OPT101 光電二極管原理圖
成本
| 部分 | 項目 | 數量 | 價格 | 總 |
|---|---|---|---|---|
| 總 | 72.45 | |||
| 電機 | PF35T-48L 步進電機 | 3 | 1.00 | 3.00 |
| 電機 | ULN2003達林頓陣列 | 2 | 0.64 | 1.28 |
| 電機 | 4N35 光隔離器 | 8 | 0.25 | 2.00 |
| 電機/RF/傳感器 | 小型 PC 板 | 5 | 1.00 | 5.00 |
| 電機 | 滑輪 | 2 | 2.75 | 5.50 |
| 電機 | 線軸 | 2 | 報廢 | -- |
| 電機 | 橡皮筋 | 4 | 二手 | -- |
| 電機 | 筷子 | 1 | 報廢 | -- |
| 電機 | 齒輪 | 1 | 4.00 | 4.00 |
| 單 片 機 | ATmega644 | 2 | 采樣 | -- |
| 單 片 機 | DIP 插座 | 3 | 0.50 | 1.50 |
| 單 片 機 | MCU 焊錫板 | 2 | 1.00 | 2.00 |
| 單 片 機 | 最大 233 | 1 | 采樣 | -- |
| 單 片 機 | RS232 接口 | 1 | 1.00 | 1.00 |
| 射頻 | RCR-433 射頻接收器 | 2 | 4.00 | 8.00 |
| 射頻 | RCT-433 射頻發射器 | 2 | 4.00 | 8.00 |
| MCU/電機 | 電源 | 3 | 5.00 | 15.00 |
| 傳感器 | OPT101 光電二極管 | 2 | 5.50 | 11.00 |
| 傳感器 | LM34 溫度傳感器 | 1 | 2.51 | 2.51 |
| 陰影 | 窗簾 | 1 | 2.66 | 2.66 |
| 陰影 | 紙板 | 好多 | 報廢 | -- |






評論