STEP FPGA驅動無源蜂鳴器模塊

硬件說明
蜂鳴器的分類:
按其結構主要分為壓電式蜂鳴器和電磁式蜂鳴器兩種類型:
按是否帶有信號源分為有源蜂鳴器和無源蜂鳴器兩種類型:
本章節和大家一起學習無源蜂鳴器的驅動,FPGA或單片機的GPIO口驅動能力弱,不能直接驅動無源蜂鳴器,常用的蜂鳴器驅動電路如下:
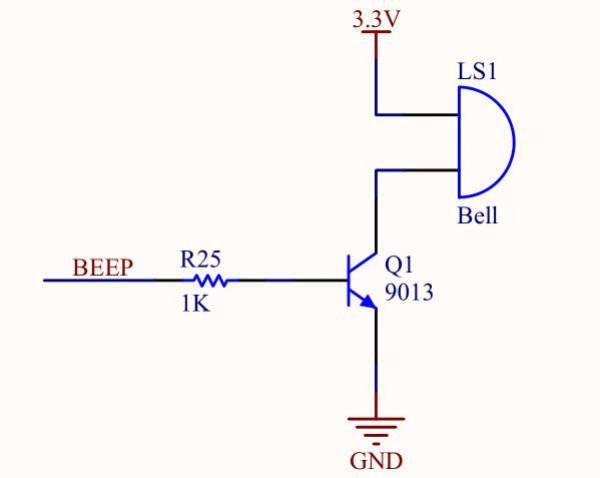
蜂鳴器使用NPN三極管(9013)驅動,三極管當開關用,當基極電壓拉高時,蜂鳴器通電,當基極電壓拉低時,蜂鳴器斷電,FPGA控制GPIO口給三極管的基極輸出不同頻率的脈沖信號,蜂鳴器就可以發出不同的音節。
不同音節與蜂鳴器震蕩頻率的對應關系如下:

我們使用PWM的方法(關于PWM的說明,快速入門中的脈沖發生器章節有詳細的介紹),使用計數器對系統時鐘進行分頻,改變計數器的計數終值從而實現調節PWM信號頻率的目的,使用PWM信號控制蜂鳴器電路。
Verilog代碼
// -------------------------------------------------------------------- // >>>>>>>>>>>>>>>>>>>>>>>>> COPYRIGHT NOTICE <<<<<<<<<<<<<<<<<<<<<<<<< // -------------------------------------------------------------------- // Module: Beeper // // Author: Step // // Description: Beeper // -------------------------------------------------------------------- // Code Revision History : // -------------------------------------------------------------------- // Version: |Mod. Date: |Changes Made: // V1.0 |2016/04/20 |Initial ver // -------------------------------------------------------------------- module Beeper ( input clk_in, //系統時鐘 input rst_n_in, //系統復位,低有效 input tone_en, //蜂鳴器使能信號 input [4:0] tone, //蜂鳴器音節控制 output reg piano_out //蜂鳴器控制輸出) ; /* 無源蜂鳴器可以發出不同的音節,與蜂鳴器震動的頻率(等于蜂鳴器控制信號的頻率)相關, 為了讓蜂鳴器控制信號產生不同的頻率,我們使用計數器計數(分頻)實現,不同的音節控制對應不同的計數終值(分頻系數) 計數器根據計數終值計數并分頻,產生蜂鳴器控制信號 */ reg [15:0] time_end;//根據不同的音節控制,選擇對應的計數終值(分頻系數) //低音1的頻率為261.6Hz,蜂鳴器控制信號周期應為12MHz/261.6Hz = 45871.5, //因為本設計中蜂鳴器控制信號是按計數器周期翻轉的,所以幾種終值 = 45871.5/2 = 22936 //需要計數22936個,計數范圍為0 ~ (22936-1),所以time_end = 22935 always@(tone) begin case(tone) 5'd1: time_end = 16'd22935; //L1, 5'd2: time_end = 16'd20428; //L2, 5'd3: time_end = 16'd18203; //L3, 5'd4: time_end = 16'd17181; //L4, 5'd5: time_end = 16'd15305; //L5, 5'd6: time_end = 16'd13635; //L6, 5'd7: time_end = 16'd12147; //L7, 5'd8: time_end = 16'd11464; //M1, 5'd9: time_end = 16'd10215; //M2, 5'd10: time_end = 16'd9100; //M3, 5'd11: time_end = 16'd8589; //M4, 5'd12: time_end = 16'd7652; //M5, 5'd13: time_end = 16'd6817; //M6, 5'd14: time_end = 16'd6073; //M7, 5'd15: time_end = 16'd5740; //H1, 5'd16: time_end = 16'd5107; //H2, 5'd17: time_end = 16'd4549; //H3, 5'd18: time_end = 16'd4294; //H4, 5'd19: time_end = 16'd3825; //H5, 5'd20: time_end = 16'd3408; //H6, 5'd21: time_end = 16'd3036; //H7, default:time_end = 16'd65535; endcaseend reg [17:0] time_cnt;//當蜂鳴器使能時,計數器按照計數終值(分頻系數)計數 always@(posedge clk_in or negedge rst_n_in) begin if(!rst_n_in) begin time_cnt <= 1'b0; end else if(!tone_en) begin time_cnt <= 1'b0; end else if(time_cnt>=time_end) begin time_cnt <= 1'b0; end else begin time_cnt <= time_cnt + 1'b1; endend //根據計數器的周期,翻轉蜂鳴器控制信號 always@(posedge clk_in or negedge rst_n_in) begin if(!rst_n_in) begin piano_out <= 1'b0; end else if(time_cnt==time_end) begin piano_out <= ~piano_out; //蜂鳴器控制輸出翻轉,兩次翻轉為1Hz end else begin piano_out <= piano_out; end end endmodule
小結
本節主要為大家講解了蜂鳴器的不同類型及無源蜂鳴器的驅動原理,需要大家掌握的同時自己創建工程,通過整個設計流程,生成FPGA配置文件加載測試。

評論