機電一體化的智能皮影表演系統*
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
*項目來源于國家級省級大學生創新創業訓練計劃項目支持(項目編號:S201910701058),并獲邀在2019年西安大學生創客節展出。
本文引用地址:http://www.j9360.com/article/202204/433244.htm作者簡介:**通信作者:王新懷,男,博士,副教授/博導,研究方向:微波毫米波電路與系統設計、智能天線與天線組陣技術等領域。
郵箱:xinhuaiwang@xidian.edu.cn。
徐茵,女,講師,研究方向:微波毫米波電路與系統設計、實時信號處理系統設計等領域。
崔鑫,段清原,范浩揚,電子工程學院電子信息工程專業。
王澤遠,微電子學院微電子科學與工程專業。
0 引言
皮影戲是我國非物質文化遺產,但因為傳統皮影表演需要長期的專業訓練,并且皮影文化在現代的流傳程度嚴重不足,所以皮影表演已經接近銷聲匿跡。筆者在陜西華縣等地考察發現,皮影表演依舊受到歡迎,但其表演形式較為單一,在數量和效率方面有著一定的局限性。
本系統將皮影戲和自動控制技術結合起來,賦予其新的表演形式。用機器人表演皮影戲,可以克服傳統皮影戲編排效率的問題,也能突破數量局限,更大范圍的發揚和傳承皮影戲。
1 系統設計
1.1 系統組成部分
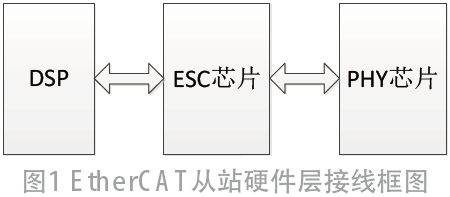
本系統整體可分為4 部分: 第1 部分負責機器人控制,包括以ESP32為核心的舵機控制系統、以74LVC4245等芯片組成的電壓控制系統和以超聲波測距模塊為核心的定位系統;第2部分是通信系統,其實現基于UDP和MQTT互聯網傳輸協議的上位機信息傳送和Wi-Fi模塊信息接收的功能;第3部分為機械結構,包括機器人結構,表演臺搭建和3D打印的連接件。第4部分是皮影表演的輔助設備,包括可遙控幕布,音響、燈光系統和GUI交互界面等。
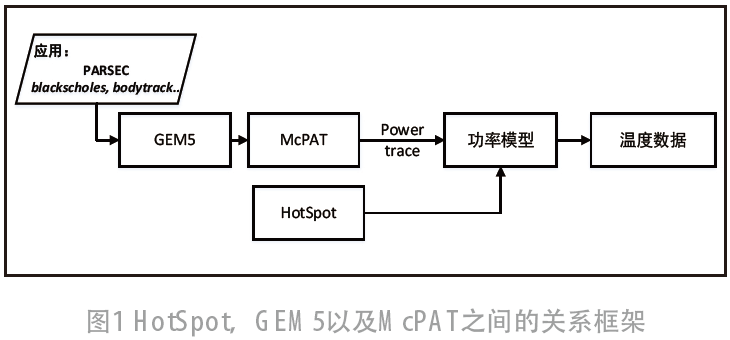
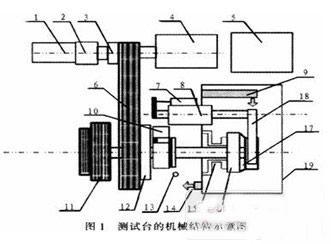
通過利用MQTT等互聯網傳輸協議快捷有效地解決了上位機和主控芯片的通信問題;應用3D打印形成機器人和皮影、以及機器人和軌道的各種連接傳動裝置;完善的機器人自由度設計可以完美的實現傳統皮影表演的各種動作。通過各個功能的有機結合,最終實現了機電一體化的智能皮影表演系統,可借助上位機實現對系統的完全控制。系統組成結構如圖1所示。
1.2 系統工作過程
上位機通過互聯網傳輸協議發送編碼后的舵機轉動角度信息給主控芯片。主控芯片解碼后,I/O端口輸出信號通過74LVC4245芯片轉化為PWM驅動信號控制機器人舵機的轉動角度。其中,上位機中的角度信息會按照不同節目打包,通過發送具體的信息包來表演不同的節目;超聲波測距模塊控制機器人的絕對位置;上位機GUI交互界面控制遙控幕布,燈光系統,音樂系統等輔助設備,最終實現機器人皮影表演。

圖1 系統框架圖
2 系統功能實現
2.1 硬件部分
2.1.1 機器人主控
主要采用ESP32芯片作為的主控芯片,ESP32芯片具備2.4 GHz Wi-Fi功能,可作為獨立系統運行應用程序,其多達16路的硬件PWM輸出正好能夠滿足皮影機器人的舵機驅動需求。在工程中我們使用基于ESP32芯片設計的ESP32-WROOM模組,只需添加很少的外圍電路就能實現開發板的設計。同時ESP32具備Wi-Fi功能,因此可實現AP與SAT聯網模式,而且也支持MQTT等互聯網傳輸協議,可實現ESP32SAT模式接入局域網、并與電腦主機實現MQTT協議的通訊。隨后,ESP32將通過局域網接收到的包含動作序列的數據轉化為機器人的狀態信息,并及時將機器人的工作狀態等信息回傳到上位機。
2.1.2 電壓控制組
電壓控制組以降壓與電平轉換為主要方案。采用12V鋰電池供電,經XL4016模組降壓到6 V左右達到舵機的驅動電壓,保證舵機正常運轉;再經過LM2940芯片穩壓至5.0 V給電平轉換芯片和超聲波測距模塊等電路供電;最后采用74LVC4245芯片將3.3 V的ESP32的I/O端口輸出信號轉換為5.0 V的PWM驅動信號,控制舵機轉動速度和具體角度,達到表演效果。電平轉換示意圖如圖2。

圖2 電平轉換示意圖
2.1.3 定位系統
采用HC-SR04超聲波測距模塊進行機器人在軌道上的定位(圖3)。使用ESP32給予模塊高電平信號啟動,模塊發送方波用于距離檢測,應用方波的發射和返回的時間差,配合計算公式可計算大概距離,再通過限幅加權平均濾波算法進行數據處理,就可以得到機器人在軌道上的精確位置。最終誤差會在1 cm之內。

圖3 定位系統示意圖
2.2.4 輔助設備
采用電磁繼電器控制大功率燈珠,可以讓上位機控制燈光的狀態,同時加上手動開關,實現自動和手動兩種控制。采用AOD4184功率NMOS管模塊對燈條進行控制,通過上位機可根據劇情調節燈光的亮度,也可實現呼吸燈效果。
2.2 軟件部分
2.2.1 服務器搭建
上位機與機器人主控板之間借助MQTT傳輸協議進行通信,MQTT是基于客戶端-服務器的消息發布/訂閱傳輸協議,具有輕量、開放、穩定的特點,可以實現一對多的消息發布。采用EMQX搭建MQTT的服務器,EMQX是物聯網MQTT協議服務器,可以支持物聯網數據的大并發數據收發。
2.2.2 上位機通信
上位機采用Python進行編程,搭建客戶端,實現與服務器的無線通信,進行動作序列和演出統籌等信息的傳輸。應用socket標準庫建立UDP連接,應用paho-mqtt庫實現MQTT的訂閱端和發布端。使用約定的端口號接收UDP廣播,獲取遙控器所發送的指令和MQTT傳輸協議所需要的主題信息。編寫濾波算法對遙控器指令進行處理,根據得到的不同指令調用開場、表演、謝幕等不同的函數。使用threading模塊實現多線程,可以同時處理多個任務。另外,利用線程threading庫中Event對象的wait方法實現阻塞效果,可以很好地實現整體程序的暫停、恢復、停止。
2.2.3 GUI界面
GUI交互界面的設計,成功實現人機交互。采用Tkinter 標準庫進行GUI 的開發,便于應用多種控件,采用place及pack等方式進行布局管理。界面操作選項多樣,包含播放、暫停、停止、音量大小、燈光亮度等選項。使用GUI交互界面,可以實現對表演系統的統一控制。
2.3 機械結構
2.3.1 表演臺系統
表演戲臺是按照傳統戲臺樣式進行設計的,采用木制雕鏤結構,配以吊墜進行裝飾,即含古風古韻,又輕巧便捷。內部支撐結構采用鋁合金框架進行搭建,整體質量較輕,拆卸組裝十分簡單,便于運輸。燈光采用的是220V供電的LED燈設備。具體為額定功率15W的燈珠對兩個皮影進行投影,和燈珠排布密集的燈條,用于照亮背景景物。幕布采用全自動化的設計,可通過上位機控制實現自動開合,按照遙控系統的控制呈現開場、謝幕等效果。音響采用雙聲道立體聲揚聲器,可以通過上位機控制具體節目的音樂播放。機器人軌道采用小摩擦力輕軌軌道,減輕軸承負擔,提高使用壽命。
2.3.2 機器人設計
借鑒傳統的皮影表演,設計了三根控制皮影的表演桿,然后根據每根桿可能需要轉動到的角度,在設計機器人時,分配給手臂4個自由度,頭部2個自由度,保證機器人可以完美、精確地實現傳統皮影動作。
2.3.3 3D打印
應用3D打印形成機器人與皮影的連接件和機器人與軌道的傳動軸承,保證機器人的運動能力和皮影與機器人動作的協調性。同時,設計固定底板把主控板電路與電壓控制組隱藏于密閉空間中,提高系統穩定性,體現工程美學。系統如圖4所示。

圖4 實現的系統整機
3 結論
本皮影表演系統具有機電一體化和輕便可拆卸等特點,其硬件與軟件各部分都已經過實際測試且正常運行。機器人與皮影的結合表演,具有一定的文化創意,符合弘揚文化自信的潮流和智能化的技術發展趨勢。
參考文獻:
[1] HETLAND M L.Python基礎教程[M].人民郵電出版社,2018.
[2] 董付國.Python程序設計基礎[M].清華大學出版社,2016.
[3] 李穎卓,梅志輝.基于STM32單片機皮影戲機器人的設計與實現[J].信息技術與信息化,2015(09):179-180.
[4] 蔡睿妍.基于Arduino的超聲波測距系統設計[J].計算機產品與流通,2020(06):170.
[5] 董彧先.基于Python的網絡編程研究與分析[J].科學技術創新,2019(20):85-86.
(本文來源于《電子產品世界》雜志2020年9月期)

評論