四軸平臺奇異點機理分析

在現代導航應用中,無論是遠程導彈還是飛機火箭,精度已經成為衡量其效能的首要因素。隨著多種導航系統的發展與應用,慣性導航以其實時性、連續性和自主性等優點,一直被廣泛應用[1-3]。慣導系統又分為慣性平臺系統和捷聯慣導系統,平臺相較于捷聯系統的優點在于通過框架隔離載體的角運動,使平臺臺體相對慣性空間始終保持穩定,為導航解算用的加速度計提供一個良好的工作環境[4-6]。
本文引用地址:http://www.j9360.com/article/202202/431516.htm對于四軸平臺而言,現有文獻認為當其外框軸旋轉±90° 時,會出現隨動伺服回路飛車現象,使得平臺失去全方位機動能力。為此,近幾年國內針對平臺系統的控制策略做了許多研究。文獻[7] 針對平臺系統的飛轉做了詳細研究,分析其產生原理并提出了算法。文獻[8]提出了一種對隨動框架控制的方法,當四軸平臺的外框軸處于奇異點時通過翻轉控制方法,使得四軸平臺保持其正常功能。文獻[9] 提出在奇異點斷開回路或者對除法器限幅這兩種方案,保障四軸平臺在奇異點穩定工作。這些研究雖然提出了控制策略,保障了平臺系統全姿態能力的機動性,但并未從機理上對奇異點的原理進行分析。為此,本文針對四軸平臺的奇異點機理進行了分析,證明了奇異點的存在性以及奇異點的唯一性。
1 四軸平臺坐標系定義及動態模型


在機體飛行過程中,機體角速度的變化是整個系統的輸入,通過框架軸物理關系逐層傳遞到臺體坐標系,并且由剛體運動學中“絕對運動= 牽連運動+ 相對運動”作為理論支撐,根據上述定義,由基座坐標系b 到臺體坐標系a 的傳遞關系可定義如下。



2 奇異點機理分析
四軸平臺的隨動框架對內框軸有伺服控制作用,通過旋轉隨動框軸來平衡內框軸的轉動角速度,保障臺體軸、內框軸和外框軸始終保持正交狀態。我們一般認為其奇異點為外框軸處于±90° 時,此時隨動框軸從Y 軸轉到Z 軸,與仍然處在Y 軸的內框軸正交,如圖3 所示,與此同時隨動框軸就失去了對內框軸的伺服控制能力。

2.1 奇異點存在性
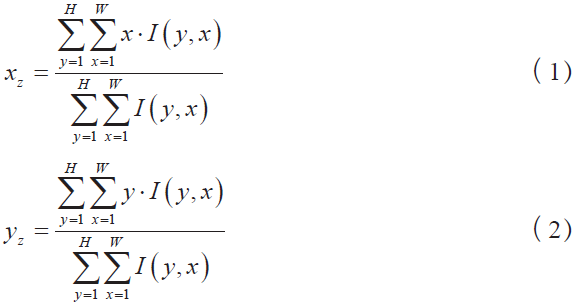
我們針對以往的實驗現象推導其理論機理,研究四軸平臺奇異點存在性原理。由于四軸平臺的內框軸始終處于零位,因此我們以內框架角速度為平衡點,建立從臺體到內框的迭代式以及從基座到內框的迭代式,其中基座到內框的迭代式由式(1)(2)(3) 可推出:

從臺體到內框為:

將式(5) 和(6) 建立等式后可得:

由于平臺隔離基座角運動的特性,因此 ,故上式經過整理可得:
,故上式經過整理可得:

將(8) 式中第一行拿出來整理可得:

2.2 奇異點唯一性
其次是四軸平臺奇異點唯一性的證明,我們需要對式(8) 進行化簡,將其展開后為:

對其逐步進行化簡,由于平臺隔離基座角運動特性的實質是相鄰框架角速率平衡基座角速率,因此對式(10)(11)(12) 進行逐步化簡。


同理可得ωbx和ωby表達式,故相鄰框架系角速率與基座角速率的關系為:

而上述推導的前提是![]() 若
若![]() ,由此式(8) 為:
,由此式(8) 為:




3 結論
本文利用慣性平臺系統慣性空間中穩定的原理,通過對四軸平臺的機理分析,論證了其奇異點無法工作的原理,同時證明了四軸平臺的奇異點有且只有一個,為四軸平臺的研究分析提供了強有力的保障。
參考文獻:
[1] 秦永元編著.慣性導航(第2版)[M].北京:科學出版社.2014.
[2] 高桂杰,張艷霞,夏剛,魏宗康.四軸平臺隨動系統的模型分析與設計[J].導航與控制,2014,13(4):21-25,31.
[3] 李海霞,高鐘毓,張嶸,韓豐田.四軸陀螺穩定平臺的變結構分區控制[J].清華大學學報(自然科學版),2010,50(7):1023-1028.
[4] 魏宗康,夏剛,高桂杰,徐強.四軸平臺伺服系統建模研究[J].中國慣性技術學報,2002(5):7-11,20.
[5] Strategic inertial navigation systems - high-accuracy inertially stabilized platforms for hostile environments[J]. IEEE Control Systems, 2008, 28(1):65-85.
[6] James A. Van Allen. Basic principles of celestial navigation[J]. American Journal of Physics,2004,72(11):67-72.
[7] 張娜,趙軍虎,余貞宇.一種基于三框架四軸慣性平臺的飛轉判斷算法[J].導彈與航天運載技術,2020(01):67-71.
[8] 趙軍虎,洪娟,李渤弘.四軸慣性平臺隨動框架控制策略研究[J].導航與控制,2017,16(4):32-37.
[9] 康堯磊,王汀,朱志剛.四軸平臺外框架角±90°時運動特性仿真分析[J].導航與控制,2009,8(2):1-8.
(本文來源于《電子產品世界》雜志2022年2月期)




評論