模擬仿真技術在智能網聯汽車開發中的作用
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
0 引言
智能網聯汽車是指搭載先進的車載傳感器、控制器、執行器等裝置,并融合現代通信與網絡技術的新一代汽車[1-2]。從國家產業發展層面以及市場需求來看,以車輛安全為核心目標的智能網聯汽車技術必將受到越來越多的重視,國家智能網聯汽車發展規劃路線圖指出,到2025 年,我國部分自動駕駛、有條件自動駕駛智能網聯汽車將有望占當年汽車市場銷量的50%,高度自動駕駛智能網聯汽車開始進入市場(如圖1~3)。根據國家智能網聯發展規劃,我們可以得出以下結論。
①智能網聯汽車從單車智能化逐步向智能化與網聯化融合的方向發展;

圖1 智能網聯汽車發展里程碑

圖2 智能網聯汽車總體技術路線圖(1)

圖3 智能網聯汽車總體技術路線圖(2)
②自動駕駛推動新型電子電氣架構演進,軟件定義、數據驅動汽車將成為未來發展趨勢;
③智能網聯汽車新技術在特定場景優先得到實踐應用,隨著技術不斷驗證與成熟,逐步向城市及郊區道路、高速公路等場景拓展;
④未來路側基礎設施將加速智能化進程,連接云控平臺與智能網聯汽車將形成多級化智能網聯交通體系。
1 智能網聯架構及開發流程
與傳統的燃油汽車和電動汽車不同,智能網聯汽車的開發更加注重整車智能行駛性能開發和控制系統開發,核心是其控制系統中的控制策略、算法、軟件、硬件、測試的開發。因此,非常有必要修正傳統車的開發流程以滿足智能網聯車產品開發需要。
不同于傳統的正向開發過程,V 模型強調控制軟件、硬件開發的協作和速度,它將軟硬件設計和驗證有機地結合起來,使軟硬件生命周期中每一個開發活動都對應一個測試活動,并且兩者是同時進行的,可以在保證較高的軟硬件質量情況下縮短開發周期(如圖4~6)。

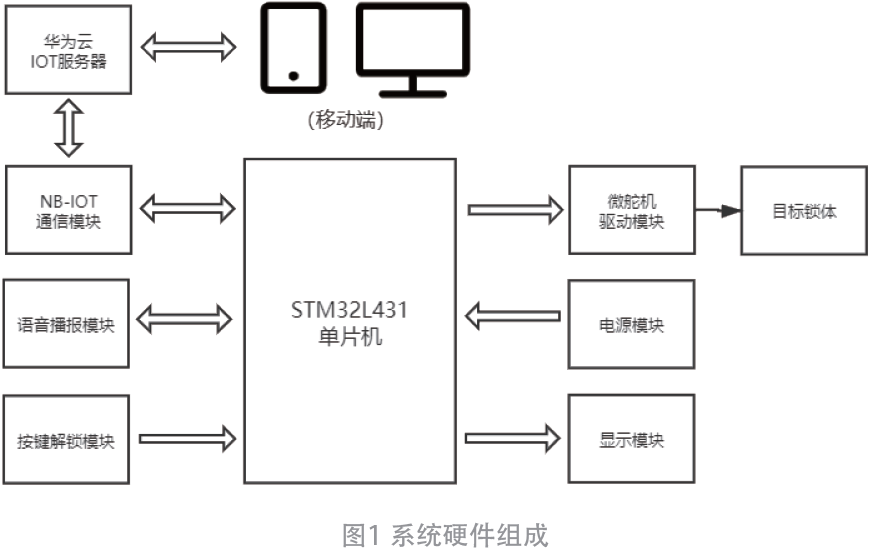
圖4 智能網聯汽車功能架構

圖5 智能網聯汽車系統架構

圖6 智能網聯汽車產品開發V字流程
針對智能駕駛的仿真測試同樣必須滿足汽車的V 字開發流程,具備覆蓋MIL(模型在環)、SIL(軟件在環)、HIL(硬件在環)、VIL(車輛在環)全開發流程的測試驗證的能力。
2 模擬仿真技術的重要性
模擬仿真技術是智能網聯汽車產品開發的要求,智能網聯汽車在投產前,需要經歷大量的道路測試驗證才能達到產品商業化要求。采用道路測試來優化自動駕駛性能耗費的時間和成本太高。據美國蘭德公司的研究,自動駕駛算法想要達到人類駕駛員水平至少需要累計177 億公里的駕駛數據來完善算法;道路測試受到交通法規和保險理賠機制限制;極端場景和危險工況行駛的安全得不到保障,且工況難以復現;世界各國交通環境和規則不同,形成通用的產業鏈體系比較困難。到2025 年左右,仿真系統實現MIL 90% 場景覆蓋、HIL 80% 場景覆蓋;具備支持CA 級智能網聯汽車測試驗證的MIL、HIL 仿真測試系統,初步建立實車交通環境在環平臺。到2030 年左右,完成仿真環境下的V2X測試工況和測試評價體系建立,實現MIL 95% 場景覆蓋、HIL 90% 場景覆蓋。具備支持HA 級智能網聯汽車測試驗證的MIL、HIL、VIL 仿真測試系統。《中國自動駕駛仿真藍皮書2020》指出:目前自動駕駛算法測試大約90% 通過仿真平臺完成,9% 在測試場完成,1% 通過實際路測試完成。隨著仿真技術水平的提高和應用的普及,行業將通過仿真平臺完成99.9%的測試量,封閉場地測試0.09%,最后0.01%到實路上去完成,這樣可以使自動駕駛汽車研發更高效、更經濟。因此,模擬仿真技術在智能駕駛開發中扮演著至關重要的角色。
3 國內外智能駕駛模擬仿真技術發展現狀
德國自動化及測量系統標準協會(ASAM)是一家非政府的汽車領域標準化制定機構。截至2019 年,共有來自亞洲、歐洲、北美洲的295 家整車廠、供應商及科研機構加入成為會員。ASAM 推出的標準涉及多個汽車標準領域,包括仿真、車聯網、測量與校準、診斷、自動化測試、軟件開發、ECU 網絡和數據管理與分析等。ASAM 啟動的OpenX 包含仿真測試標準達到了5 項(如圖7)。

圖7 ASAM仿真格式標準
2019 年中國數據(中汽中心下屬中汽數據有限公司)與ASAM 合作,共同組建C-ASAM 工作組,對ASAM OpenX 標準的仿真場景標準進行了拓展。

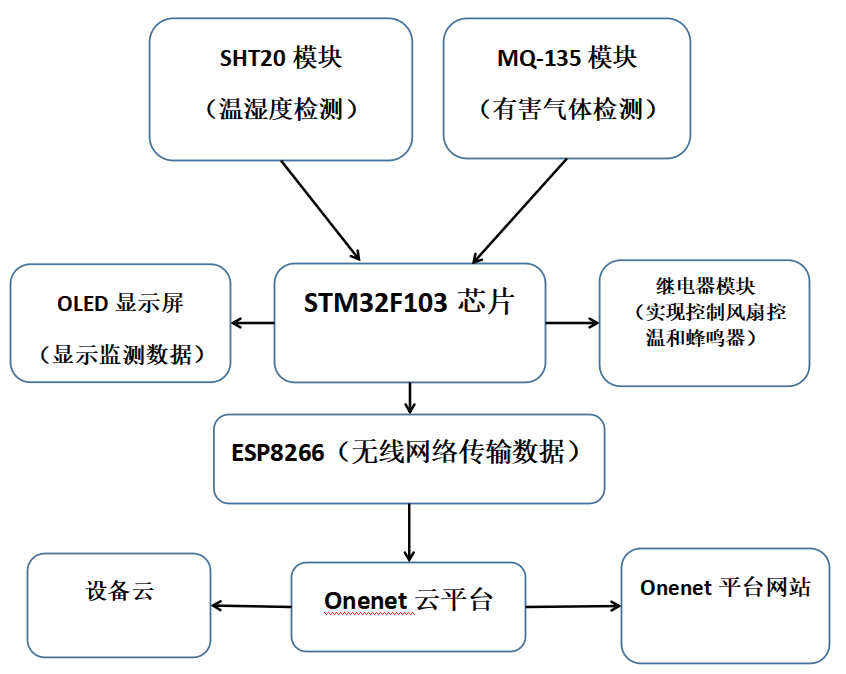
圖8 智能駕駛仿真系統框架
4 智能網聯模擬仿真技術應用
完整的智能駕駛仿真平臺包括靜態場景庫、動態案例仿真、感知傳感器仿真、車輛動力學仿真、路徑規劃決策算法驗證等功能。總體來說,自動駕駛核心算法包括感知融合算法、決策規劃算法、控制算法三大環節。相應的,智能駕駛仿真測試平臺也應該具備完成上述三個算法的仿真測試能力,感知融合算法仿真需要高還原度的三維重建場景和精準的傳感器模型;決策規劃算法的仿真需要大量的場景庫為支撐;控制算法的仿真需要引入精準的車輛動力學模型。虛擬場景構建:智能駕駛汽車的仿真測試,首先需要模擬構建出與真實世界一致的車輛運行場景,而場景的構建可以分為靜態場景構建和動態場景構建兩個層面。靜態場景構建的作用是還原出場景中與車輛行駛相關的靜態元素,例如道路(包括材質、車道線、減速帶等);靜態交通元素(包括交通標志、路燈、車站、隧道、周圍建筑等)。最常用的手段是基于高精度地圖及三維重建技術完成場景的構建,或者基于增強現實的方法來構建場景。廣義的動態場景元素包括動態指示設施、通信環境信息等動態環境要素,以及交通參與者(包括機動車行為、非機動車行為、行人行為等)、氣象變化(雨、雪、霧等天氣狀況)、時間變化(主要是不同時刻光照的變化)等。感知系統仿真:攝像頭仿真的一般方法是基于環境物體的幾何空間信息構建對象的三維模型,直白一點就是生成逼真的圖像;毫米波雷達仿真:一般會根據配置的視場角和分辨率信息,向不同方向發射一系列虛擬連續調頻毫米波,并接收目標的反射信號。不同車輛的雷達回波強度可使用微表面模型能量輻射計算方式,由車輛模型以及車輛朝向、材質等計算;激光雷達仿真:參照真實激光雷達的掃描方式,模擬每一條真實雷達射線的發射,與場景中所有物體求交;智能駕駛汽車在仿真測試中,需要借助車輛動力學模型模擬車輛來客觀評價決策及控制算法。因為,復雜的車輛模型,可以保證車輛有良好的仿真精度,使被控制對象的反應更貼近真實世界。車輛動力學仿真:車輛動力學模型是基于多體動力學搭建的模型,其中包含了車體、懸架系統、轉向系統、制動系統、動力系統、傳動系統、車輛動力學系統、硬件IO 接口等多個真實部件的車輛模型。將這些被控對象模型參數化之后,就可以把真實的線控制動、線控轉向系統和智能駕駛系統集成到大系統中共同做仿真測試。云加速仿真:仿真系統在進行仿真任務時需要訪問大量采集或者生成的數據,并根據生成的數據利用CPU和GPU 資源對數據進行再處理并還原,或者對已經結構化的數據進行GPU 渲染再現。這就需要使用一種機制將仿真任務分配到多個機器上,并且讓所有機器協同工作,這樣做能夠降低單個機器的性能需求,從而使得大規模仿真任務得以實現。
4 結束語
智能駕駛模擬仿真技術在智能駕駛產品開發中將發揮著越來越重要的作用,可以說該技術關系著智能網聯產品開發的成敗,在整車開發流程中,建立V 模型的控制系統開發流程體系,嚴格把控系統的策略、算法、軟件、軟件及測試質量,產品設計階段加強智能駕駛仿真技術(MIL、SIL、HIL、VIL)應用,產品路試之前,進行VIL 測試,可以節省智能網聯產品的開發周期,并可有效提升智能網聯產品的開發質量。
參考文獻:
[1] 狄佐龍.智能網聯汽車仿真測試方法[J].汽車工程師.2019(4):35-38.
[2] 馬文靜.基于城市智能汽車的感知服務仿真系統的研究與實現[D].北京:北京郵電大學,2017.
[3] 柴琳果,蔡伯根,上官偉,智能網聯智能車運動學仿真基礎環境構建方法[J].華南理工大學學報(自然科學版),2018,46(1):72-83.
(本文來源于《電子產品世界》雜志2021年9月期)


評論