基于微機械加速度計的無鍵多功能電視遙控器

1 引言
隨著科技高速發展,人們日用品不斷向易操作、易攜帶、智能化的方向發展。電視作為重要的生活用品,其遙控器易操作、無鍵化、智能化是目前發展趨勢。隨著微機械加速度計技術的日趨成熟,其微小化、低功耗、高精度、智能化、低成本的特點使電視遙控器的應用得以實現。
此設計利用單片機體積小、功能豐富、精度高及在線仿真方便快捷的特性,實現對電視機的簡單方便的控制。該設計采用完全無鍵化的設計模型,利用加速度計準確測定控制方向。此遙控器有二維4個方向,即4個功能鍵。經實踐分析,4個鍵可滿足對電視機的基本操作。在正常狀態下,X軸方向作音量調節,Y軸方向作頻道調節。系統采用電池組供電,采用電視遙控通用編碼,實用方便,適用于社會不同人群的操作方式和習慣,其簡易、低功耗的特點,是未來電視遙控發展的方向。該設計的創新點:實現控制系統的無鍵化,用微機械加速度計的方向量及在各方向量上的大小實現遙控;電路設計獨特,完全符合加速度計性能的設計特點;該產品體積小,電池供電,外觀設計靈活性強,對其不同程度的改變,可適用于不同場合,不同人群;通過軟件實現對加速度計的誤差消除和算法測量。
2 系統結構
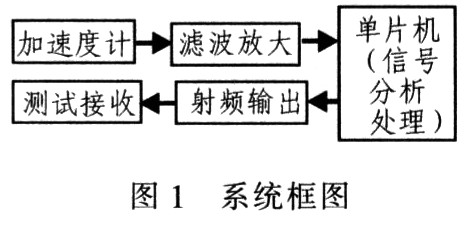
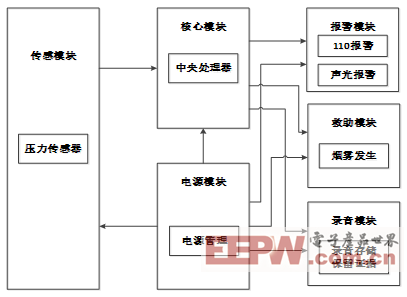
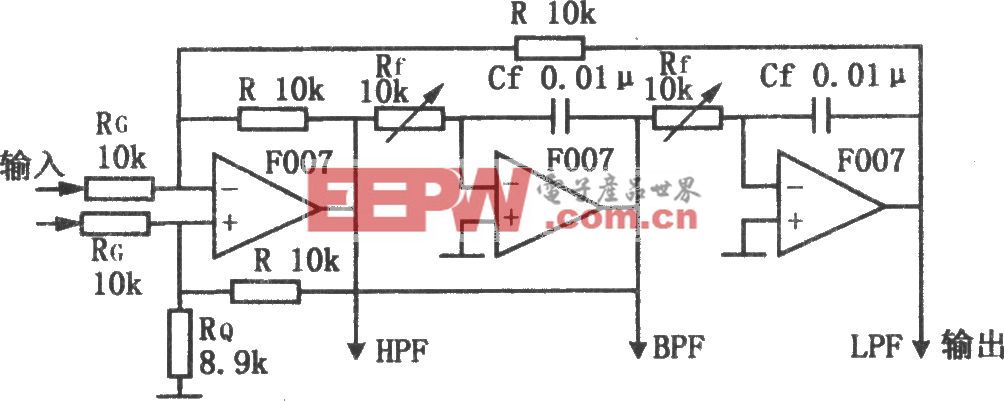
整個系統主要包括信號的采集、處理、發送3部分。每個模塊的設計都直接影響系統功能的實現。一般加速度計輸出的模擬信號比較微弱。由于系統中內部和外部干擾的影響,被測信號參雜有干擾信號,當被測信號很微弱時,就會被干擾噪聲“淹沒”,導致很大的數據采集誤差。因此必須在放大之前對信號進行濾波。把信號放大到適當的量程內,以獲得盡可能高的分辨率。另外,該模塊應盡可能靠近信號源,這樣信號在受環境影響之前即被放大,使信噪比得以改善。這里選用LM358 濾波放大電路。再將經放大的模擬信號傳到A/D轉換器中,轉換成數字信號,由于單片機內部帶有A/D轉換功能,因此整個轉換過程是在單片機內部實現的,而無需添加額外的A/D轉換器。同時利用單片機分析、處理信號;然后通過射頻收發模塊發射信號。系統框圖如圖1所示。
3 硬件電路設計
無鍵多功能電視遙控器的硬件主要包括加速度計傳感器單元,控制器單元及紅外發射單元3部分。
3.1 加速度計傳感器單元
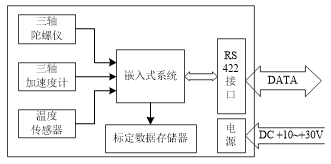
加速度計傳感器單元原理框圖如圖2所示,選用三軸的加速度計ADXL330,該器件可同時測量3個不同方向的重力加速度。該系統只采用2個輸出信號,即X軸和Y軸方向。

3.2 控制器單元
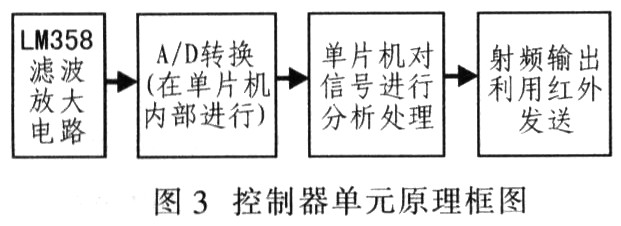
圖3為控制器單元原理框圖,控制器的P30/AN00和P31/AN01引腳接收放大后的傳感器采集信號。P60~P67和P00~P07引腳與發射器相連,發送發射碼。MOD引腳外接跳線,在工作模式或下載燒寫模式可選擇相應電壓。RST復位引腳外接按鍵用于系統復位。
3.3 紅外發射單元
紅外發射單元選用MC50462AP,其采用5 V(AVDD)供電,通過紅外二極管口發射遙控編碼。
4 軟件設計
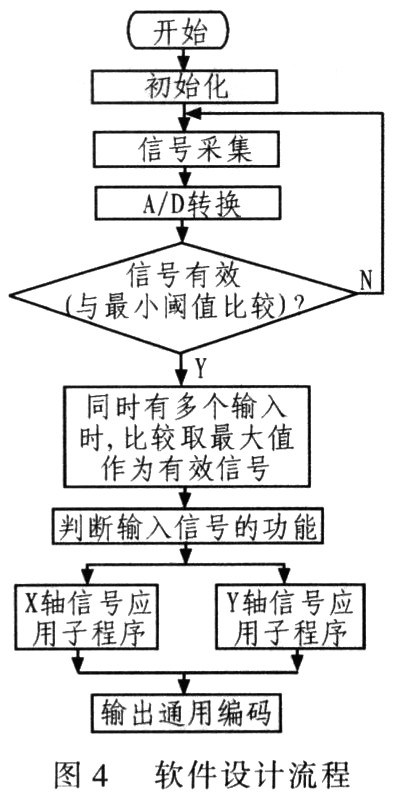
單片機上電復位后,首先判斷輸入端口是否有模擬信號輸入,如果沒有則重復檢測、判斷,如果有,則對端口信號進行循環采集。采集后在單片機中對采集的信號進行A/D轉換,對轉換后的數字信號進行大小標定。由于種種原因,輸入的加速度信號不可能是單一方向的,因此,進行簡化處理,假定輸入信號始終是單一方向,若同時檢測到多個方向有輸入,則將比較各個輸入,然后選擇一個最大值作為其唯一輸入。最后通過對輸入進行分析,設計各個輸入的處理子程序,設定其功能。
由于三軸加速度計能輸出3個不同方向的加速度值,因此可以對不同的輸入設定其不同的功能,每一種輸入對應一種功能,并通過各自的子程序體現。圖4為軟件設計流程。
由于該系統使用電池供電,所以在無信號輸入時,系統處于休眠狀態,當有信號輸入時才處于工作狀態。開始或復位5 s后,若無信號輸入,則進入休眠狀態以減小電源消耗。
通過試驗驗證人為擺動遙控器的平均最小加速度為1 g,即系統所設定的標定值為1 g,加速度小于1 g,則認為是無效信號。在此系統中,不必特別地考慮對輸入抖動的消除,完全可把抖動作為一次輸入信號處理。信號發射完全采用通用電視機遙控的發射原理,微處理器芯片內部的振蕩器與外部的振蕩晶體組成高頻振蕩器,產生高頻振蕩信號。此信號送入定時信號發生器后產生正弦信號和定時脈沖信號。正弦信號送入編碼調制器作為載波信號;定時脈沖信號送至指令編碼器作為調制信號待發送,然后在調制器中調制后送到紅外線發光二極管VD發射脈沖調制信號。
5 結束語
介紹一種基于微機械加速度計的無鍵遙控器的設計。該產品可利用運動姿勢控制電視,操作簡單方便,尤其適合行動不方便的群體。同時具有很強的擴展功能,可控制玩具車、電動玩具的姿態及控制車間內生產機床。由于微加速度計體積小,低功耗以及低成本,類似的設備具有廣泛的市場。








評論