基于ARM的智能避障小車設計

0 引言
本文引用地址:http://www.j9360.com/article/201808/388083.htm汽車的緊急避障是由電腦模擬司機的主動控制過程,以汽車為控制對象進行實時信號采集、分析和處理,在緊急情況下可代替司機的駕駛操作。通過紅外線傳感器可以感知汽車行駛環境,實現汽車的避障功能。
本文通過s3c44b0x開發板和ADS集成開發平臺,設計出基于嵌入式系統的智能小車控制器。其優點是功耗低、體積小、集成度高、可靠性強,為智能汽車技術的發展提供了廣闊的前景。
1 系統的功能描述
普通的玩具小車一般需要在外加條件下才能按照自己的設想避開前方存在的障礙去自動行駛,而目前可借助嵌入式技術讓小車無需外加條件便可完成智能化,即實現自動避開障礙物的功能。從原理上講主要是依靠小車上的紅外避障傳感器來檢測可能出現的障礙物的信號并將其反饋回控制電路。當傳感器檢測到障礙物時,傳感器會產生高電平信號
驅動某一側步進電機轉動使得小車能夠平穩轉動方向,隨后繼續前進。
2 系統硬件設計
總體設計方案的硬件部分如圖1所示。
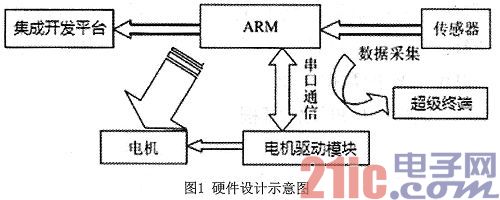
在本設計中選擇的開發平臺是ADS集成開發環境,通過s3c44b0x芯片相關工具tftp等進行硬件方面的設計調試工作。
紅外傳感器是一種能探測紅外線的器件,能把紅外輻射量變化轉換成電量變化。本設計所采用的紅外避障傳感器GP2YOA02YK性能如下:1)反射率:對反射物體的顏色有較小影響。2)傳感器返回的模擬電壓值與測量的距離值一一對應。3)探測距離的范圍:10~60cm。4)不需要外部控制電路。
硬件設計中選用的直流電機驅動模塊是中小電流 直流電機專用驅動器,所用芯片1293屬于H橋集成電路,其輸出電流為1000mA,最高電流2A,最高工作電壓36V,可以驅動感性負載,比如小型直流電機、繼電器、步進電機和開關電源晶體管。當驅動小型直流電機時,可以直接控制兩路電機,并可以實現電機正轉與反轉,實現此功能只需改變輸入端的邏輯電平。該驅動模塊具有體積小、控制方便的特點。測試實驗表明采用此模塊能夠對電機進行平穩可靠的控制。
3 系統軟件設計
系統軟件設計在集成開發環境ADS和Microsoft Vistlal C++6.0集成開發平臺下完成,主要采用C語言進行程序編制。軟件設計主要包括對控制主程序、電機驅動程序、中斷程序和軟件算法等程序的設計。
在系統整體設計的初始階段,智能小車系統的正前方安裝一個紅外線避障傳感器,通過這個傳感器采集來自正前方的障礙物信號,然后將其傳遞給控制系統,由控制系統根據該信號進一步采取動作控制兩個步進電機的運轉,在經過設定好的一定時間的延時過程之后,系統主程序動作繼續循環進行下去,直到電源關閉或者系統出現故障。
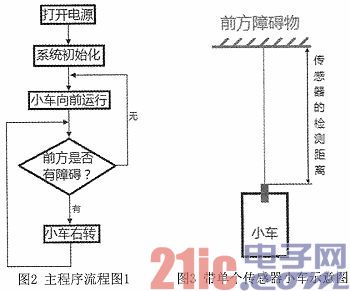
小車主程序流程圖如圖2所示,其初始化過程包括ARM微處理器的初始化和外部驅動電路的初始化等。圖3為小車使用單個傳感器示意圖。
4 系統深入設計展望
繼本次系統設計使用單個傳感器進行智能避障小車設計完成之后,下一步計劃是使用三個傳感器進行功能更加完善、系統更加穩定的智能避障小車設計。
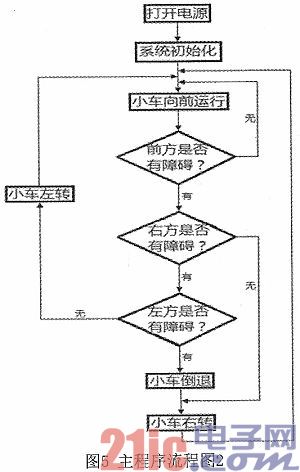
圖4為使用三個紅外避障傳感器的小車示意圖。圖中,三個傳感器分別位于小車的左、中、右方,能夠檢測來自左、前、右三方的障礙物信號。針對此硬件框架設計,相應的主程序流程圖如圖5所示。
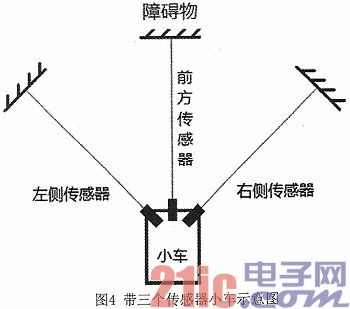
三個傳感器分別檢測三個方向的障礙物的好處是明顯的,因為能夠最大程度地擴充智能避障小車的“視野”,但同時也存在一些問題,比如三個傳感器掃描范圍之間的檢測死區就是智能小車一個比較大的硬傷。因此,在接下來的設計中,我們將針對諸如此類的問題進一步研究分析,爭取能夠在不影響智能小車基本功能的前提下豐富小車系統的設計。
5 結論
由于板,該板有十八種設計功能,在本試驗中就應用其一種功能,即產生控制直流減速電機的脈沖。本系統設計簡單、軟件編程易實現、實時性好且成本較低,紅外線傳感器對障礙物的檢測雖然存在些誤差,但并不影響小車避障。在室內環境中,小車可以順利繞過障礙物到達指定地點。但是由于紅外線探測儀的角度問題和車的寬度問題,使小車在障礙物較大時不能全部避開障礙物,所以小車并不能完全實現智能,因為傳感器獲得的信息非常有限,而且對步進電機的控制受到驅動的影響也帶有不確定性。在程序燒制方面,由于技術或方法等方面的原因,使程序在燒制后有時也會出現自動刪除的問題。總的來說,實驗是成功的,因為基本實現了實驗前所要求的功能。










評論