電動機控制中的高精度建模技術

1 概述
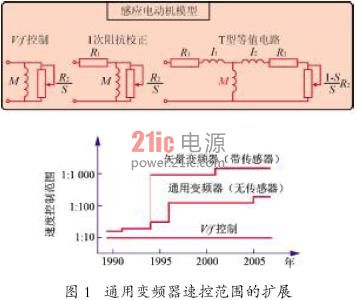
本文引用地址:http://www.j9360.com/article/201808/387772.htm以變頻器和伺服器為典型的可變速電動機控制用電力電子(PE)裝置,隨著半導體器件制造技術、電路封裝技術的進步而不斷向高性能化、小型化、輕量化方向發展。在這些硬件技術提高的同時,電動機控制技術也在不斷提高。圖1所示為通用變頻器中速度控制范圍(調速比)的擴展。對于最簡單的V/f控制,模型簡化,即使電動機參數未知,也適用于大部分感應電動機的驅動,速控范圍約1∶10;而矢量控制時,要求具有精確的模型和正確的電動機參數,并配置速度傳感器,其調速比已擴展到1∶1 000,15年間通用變頻器的調速范圍約提高了10倍。
控制性能的提高,基于建立高精度的模型。在CPU(中央處理單元)初始性能階段,用于控制的電動機模型必須簡單。僅在CPU 性能提高以后,才有可能使用高精度的模型。這不僅與CPU和功率半導體器件、傳感器等硬件的發展有關,而且也涉及到電動機控制技術的進步。
如原來那樣,將電動機的電路方程式作為模型使用,理論上可適用于異步電動機和同步電動機的矢量控制。但是,因溫度、磁飽和導致電動機參數的變化,高次諧波、鐵損的影響等,仍然是產生誤差的主因。
在異步電機控制研究中,建立電機的動態數學模型時為方便分析,為便于列出其基本方程式,通常忽略電機的鐵損。但電機鐵損是真實存在的。研究表明采用高硅鋼片做鐵心材料的大型電機,其鐵損約為銅損的10%~20%,而采用較厚普通硅鋼片的小容量電機,鐵損則可達到銅損的50%;此外,在精確異步電機矢量控制中,鐵損的存在將影響定子電流中勵磁電流分量與轉矩電流的解耦,造成磁場定向偏差,影響控制精度。故采用忽略鐵損的電機模型來研究其控制系統,就有可能導致研究結果的不準確。對于精確矢量控制及其相關控制的仿真研究,電機模型的準確性直接影響仿真結果的可靠性。
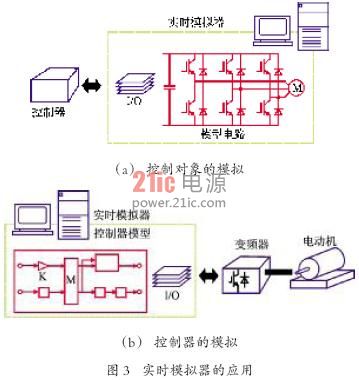
在電動機控制領域,由于實時模擬器的引入,提高了開發效率。用實時操作的仿真裝置代替實際的電動機和變頻器,以達到實驗驗證的高效化。而且,近年來在廣泛應用的實時仿真裝置等虛擬的開發環境中,為提高與實際設備(真機)的等值性,務必構建高精度的模型。也即,要結合電磁分析、考慮電動機結構而建立的模型。電動機模型的高精度化,則可充分顯示電機控制技術的新發展。
本文對高精度模型及電動機控制的有關研究予以闡述。
2 電動機的控制與模型
現代交流變頻調速技術中,磁場定向的異步電動機矢量控制技術實現了轉矩和磁鏈的解耦,使異步電動機的調速性能達到直流調速水平。可是在矢量控制算法中,電機的磁鏈瞬時值不能直接測量,需根據定子電流、電壓瞬時值和電機參數推算。電機參數設定不準會帶來定向誤差,破壞解耦關系,因而影響調速性能。
2.1 電動機的控制方式
為易于理解模型在電動機控制中的作用,現以感應電動機的控制方式為例說明之。感應電動機控制方式中最簡單的是V/f控制。當改變頻率(f)時使輸出電壓(V)與f的比值固定不變,從而保持勵磁電流恒定。在這一V/f 控制下,僅用勵磁電感和2 次阻抗建立電動機模型,而未考慮過渡項,這就更加簡化了正常狀態下作為感應電動機模型的T 型等值電路。V/f控制時,模型中忽略了電動機一次線圈因電壓降而導致的實際有效電壓下降,故在低速范圍內,其特性劣化。
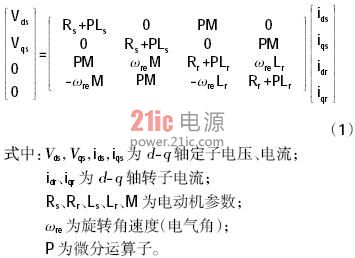
與此相應,矢量控制仍以電動機電路方程式作為模型使用。例如在固定的正交d-q 軸上,通過式(1)建模。
采用式(1)的數學模型進行無傳感器矢量控制時,適應磁通觀測器的結構如圖2所示。我們使用的是由電動機電路方程式式(1)經變形后得到的動態方程式(2)。
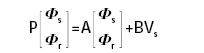
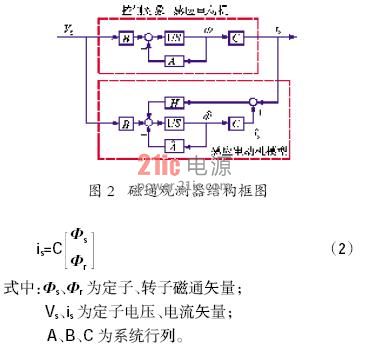
控制對象為感應電動機,控制中所用的感應電動機模型由式(2)表示。如果電動機參數相符的話,對應于相同輸入s的輸出is是相同的。故若在相互輸出誤差接近零的控制下,動態變量的磁通椎在t=肄時是相等的,感應電動機的磁通則可求知。
如上所述,電動機模型達到了與電路方程式等值的水平。但隨著市場需求的不斷提高,還要求進一步改進與開發建模技術。
2.2 自整定技術
從上節看到,控制方法越先進,越需要正確的電動機參數,為得到準確的電動機參數,則要求實現自動調諧(自整定),即根據速度和負荷的變化,自動調整控制系統的參數,使系統具有快速的動態響應。
自整定技術分為離線式(off-line)和在線式(online)兩種,離線式自整定是變頻器本身在離線情況下,具有測定、記憶電動機參數的功能。由離線式自整定測定的電動機參數參用于驅動電動機時,因損耗導致溫度升高的不同測定條件和不同溫度,使測定的電動機參數與實際的電動機參數有誤差,系統運行后不能實時修改系統參數,因而劣化了控制性能,不能達到最佳控制特性。目前,電機參數離線自測定已被應用。而電機運行中,隨著集膚效應的影響,轉子電阻和時間常數將發生較大變化,影響磁鏈定向和算法控制精度。因此,需要在矢量控制算法中,加入有效可行的轉子參數在線辨識算法,以實現完全解耦控制。



















評論