整流器控制算法的一般問題討論

0 引言
本文引用地址:http://www.j9360.com/article/201808/387529.htm數學模型是整流器控制算法仿真的基礎,根據不同的控制需要可以建立不同的數學模型。本文除了研究整流器數學模型之外,還介紹了基于不同坐標系數學模型的坐標變換、單位功率因數的定義、PWM 整流器四象限運行原理等與整流器控制算法仿真相關的一般性的問題。。
1 三相電壓型整流器數學模型
1.1 三相電壓型整流器一般數學模型
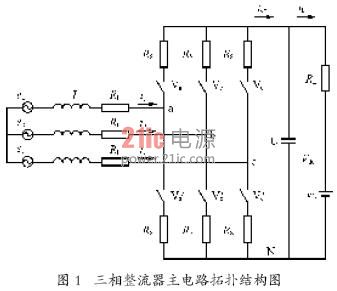
所謂三相電壓型整流器一般數學模型就是根據三相電壓型整流器拓撲結構,在三相靜止坐標系(a,b,c)中,利用電路基本定律(基爾霍夫電壓、電流定律)對三相電壓型整流器所建立的一般數學描述。三相電壓型整流器拓撲結構如圖1所示。
該數學模型在以下假設條件下建立:
1)電網電動勢為三相平穩的純正弦波電動勢(ea,eb,ec);
2)網側濾波電感L 是線性的,且不考慮其飽和狀況;
3)功率開關管損耗以電阻Rs表示,即實際的功率開關管可以用理想開關與損耗電阻Rs 串聯等效來表示;
4)為描述整流器能量的雙向傳輸,整流器直流側負載由電阻RL和直流電動勢eL串聯表示。
根據三相電壓型整流器特性分析需要,其一般數學模型的建立可采用以下兩種形式:
1)采用開關函數描述的一般數學模型;
2)采用占空比描述的一般數學模型。
采用開關函數描述的一般數學模型是對整流器開關過程的精確描述,較適合于整流器的波形仿真,因此本文所述的整流器系統仿真是采用開關函數描述的數學模型。下面以三相整流器拓撲結構為例,建立采用開關函數描述的一般數學模型。
為分析方便,首先定義單極性二值邏輯開關函數sk為

將整流器的功率開關管損耗等效電阻Rs 同交流濾波電感等效電阻RI合并,且令R=Rs+RI,采用基爾霍夫電壓定律建立三相整流器的a相回路方程為


1.2 三相電壓型整流器d-q 模型
三相靜止對稱坐標系下的一般數學模型具有物理意義清晰、直觀等特點。但是這種數學模型中,整流器交流側均為時變交流量,因而不利于控制系統的設計。為此,可以通過坐標變換將三相對稱靜止坐標系(a,b,c)轉換成以電網基波頻率同步旋轉的(d,q)坐標系。這樣,經坐標旋轉變換后,三相對稱靜止坐標系中的基波正弦交流變量將轉化成同步旋轉坐標系中的直流變量,從而簡化了對控制系統的設計。
三相整流器一般數學模型經同步旋轉坐標變換后,即轉換成三相整流器d-q 模型。
要實現從三相靜止坐標系(a,b,c)到兩相同步旋轉坐標系(d,q)的變換,必須首先確定坐標系(d,q)的空間位置。如圖2 所示,在三相靜止坐標系(a,b,c)中,E、I 分別表示三相電網電動勢矢量和電流矢量,并且E、I 以電網基波角頻率棕逆時針旋轉。根據瞬時無功功率理論,在描述三相電量時,為簡化分析,將兩相旋轉坐標系(d,q)中q 軸與電網電動勢矢量E同軸。即q 軸按矢量E定向,矢量E(q 軸)方向的電流分量iq定義為有功電流,而比矢量E 滯后90毅相角的軸(d軸)方向電流分量id定義為無功電流。另外,初始條件下,令q 軸與a軸重合。

1.3 坐標變換在Matlab/Simulink中的實現
從三相靜止坐標系(a,b,c)到兩相同步旋轉坐標系(d,q)的變換是算法仿真中重要的模塊之一。滑模變結構電流控制算法本身就是基于兩相同步旋轉
坐標系的;滯環SVPWM 算法雖然是基于三相靜止坐標系的,但是在對電流控制效果的分析中也用到了坐標變換模塊。在此將該模塊功能的實現方法做簡單介紹。
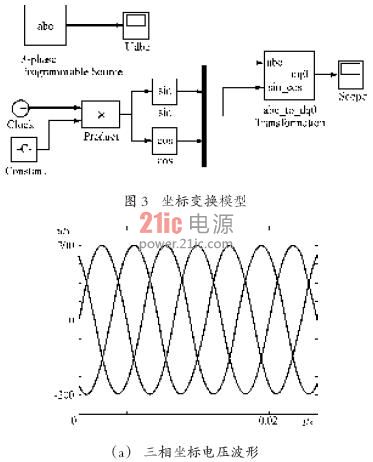
三相靜止坐標系到兩相任意旋轉坐標系的變換及其反變換已經建立在Smulink 的power system 模型庫中,提取路徑為power system blockset / extra library / measurements / abc_to_dq0 transformation(dq0_abc transformation)。應用該模塊實現坐標變換的例子如圖3所示。仿真結果如圖4所示,其中圖4(a)為變換前的三相電壓,圖4(b)為經坐標變換后旋轉兩相坐標系上的電壓波形,由于所選角頻率棕與電源角頻率同步,所以在兩相同步旋轉坐標系上的電壓已經是直流。


















評論