變頻器與微機的串行通訊設計

0 引言
本文引用地址:http://www.j9360.com/article/201808/387514.htm在工業電氣傳動裝置中,變頻器因應用方便,性能可靠,所以被作為首選的電機控制器得到廣泛應用[1]。計算機控制技術與現代變頻器技術相結合,采用變頻器的標準RS485通訊接口和內置協議,可以方便地實現微機對下位機的集中控制,并且易于軟件實現,費用低廉,具有較高的可靠性和實用價值[2]。
為了便于操作和監控電動機的運行工況,需要對其電壓、電流、頻率、轉速及工作狀態等關鍵信息進行監測,并根據工作需要,修改相應的參數,調整電動機的工作狀態。這些信息可通過變頻器(下位機)傳給微機(上位機),因此需要變頻器與微機進行通訊,通過微機監控變頻器來控制、協調電動機的運行。本文基于Visual C++下的MSComm控件來實現微機與變頻器的串口通訊。
1 變頻器通訊機制
1.1 系統硬件總體結構簡圖
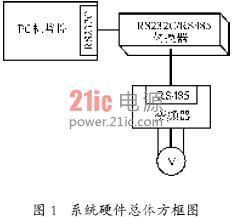
由于多數工業用變頻器提供的是符合RS485標準的串行通訊接口,而微機的通訊接口多為RS232C接口[3],因此在二者之間需要加接RS485-RS232C接口轉換器。這樣利用該接口通過軟件編寫的通訊驅動程序就可以實現微機與變頻器的信息交換。系統硬件總體方框圖如圖1所示。
1.2 串行通訊
串行通訊是指外設和計算機間使用一根數據信號線傳送數據,這些通訊數據在信號線上是按位進行傳輸的,每一位數據都占據一個固定的時間長度。
這種通訊方式的優點是使用的數據線少,在遠距離通訊中可以節約通訊成本。當然,其傳輸速度比并行通訊慢。對于RS485 串行接口其最大傳輸速率為10 Mbit/s,最長通訊距離為1 200 m。
1.3 通訊協議格式
串口通訊傳輸的基本思想基于幀傳輸方式,即在向串口發送數據時是逐幀發送。在每幀傳輸過程中采用應答方式[4]。具體為上位機發送命令參數,變頻器首先通過校驗判斷是否為正常幀,若校驗為正常幀,可以接收并做出應答。否則丟棄不予應答。
本文所舉例的變頻器的通訊幀格式如圖2 所示,每一幀都由幀頭、幀格式數據塊、校驗和、幀尾四部分構成。

EOT:起始位,1個字節;
DATA:數據塊,n 個字節,包括命令字、參數、工作狀態等內容;
BCC:校驗和,2個字節,為其前5 個字節數據之和,低位在前,高位在后;
ETX:結束,1個字節。
通訊協議的數據格式為:
1)串口幀采用10位幀,1位起始位,8位數據位,1位停止位,無奇偶校驗位,均為十六進制數據,字長為8 bit,采用COM1串口,波特率為9 600 bit/s;
2)變頻器根據上位機指令向上傳送相應數據;
3)應答發送,微機發出修改命令,變頻器接收命令后,修改參數,并把參數修改情況傳給上位機;
4)上位機發送其他命令如啟動、停止等。
2 MSComm控件
Microsoft Communication Control(簡稱MSComm)是Microsoft 公司提供的在Windows下進行串行通訊編程的ActiveX控件,它為應用程序提供了通過串行端口接收和發送數據的簡便方法。
2.1 MSComm控件的引用
MSComm 控件的引用和其他ActiveX 控件的引用類似,一般都是在Visual C++6.0環境下,新建一個工程,在“工程”菜單下,選擇“增加到工程”的Components
and Controls Gallery 選項,在彈出的對話框中打開“Registered ActiveX Controls”,選擇“Microsoft Communications Control version 6.0”插入到工程中,這樣類似電話機模樣的MSComm控件就出現在工具框中,用戶可以像使用內部控件那樣把它添加到窗體。
值得一提的是,該控件可以放在窗體的任一位置,在運行的時候對外是不可見的。
2.2 MSComm控件兩種處理通訊的方式
MSComm控件有兩種處理通訊的方式,包括事件驅動方式和查詢方式[5,6]。在文獻[5,6]中對此做了詳細介紹。
2.3 MSComm控件的屬性
MSComm 控件中比較重要的幾個屬性如下:
CommPort 設置并返回通訊端口號,缺省值為COM1,可設置1~16個;
Settings 以字符串的形式設置并返回波特率、奇偶校驗、數據位、停止位;
PortOpen 設置并返回通訊端口的狀態,也可打開和關閉端口;
Input 讀入并清除接收緩沖區的字符;
Output 將發送的字符串或數組寫到發送緩沖區;
CommEvent 在通訊錯誤或事件發生時產生;
OnComm 事件,CommEvent 屬性存有該錯誤或事件的數值碼。
3 軟件實現
3.1 程序模塊
軟件實現主要包括上位機初始化程序模塊,串口事件處理模塊,數據校驗模塊,數據處理模塊等。
3.1.1 上位機初始化模塊
打開串口并設置串口參數,同時,預讀緩沖區以清空殘留數據,對串口初始化。設置的串口參數包括:串口號、波特率、奇偶校驗位、數據位、停止位等。
主要代碼如下:
If(m_ctrlComm.GetPortOpen())
m_ctrlComm.SetPortOpen(FALSE);// 檢查串口,如果是打開的,則關閉
m_ctrlComm.SetCommPort(1); // 根據協議要求,選擇COM1端口
m_ctrlComm.SetSettings(“9 600,n,8,1”);// 設置波特率9 600,無校驗,8個數據位,1個停止位
m_ctrlComm.SetInputMode(1);//1:表示以二進制方式檢取數據
m_ctrlComm.SetRThreshold(1);// 參數1表示每當串口接收緩沖區中有多于或等于1 個字符時將引發一個接收數據的OnComm事件
m_ctrlComm.SetInputLen(0);//設置當前接收區數據長度為0,表示全部讀取
m_ctrlComm.GetInput ();// 先預讀緩沖區以清除殘留數據
3.1.2 串口事件處理模塊
該模塊主要是接收下位機發送來的數據包,并對數據包進行數據類型的轉換,以便于數據處理模塊和數據校驗模塊對其進行處理。主要代碼如下:
switch(m_ctrlComm.GetCommEvent ())// 代表控件引起的事件
{
case 2: //comEvReceiv 事件,事件值為2 表示接收緩沖區內有字符
{
VARIANT variant_inp;
COleSafeArray safearray_inp;
LONG len,k;
BYTE rxdata[2048];
CString strtemp,m_str;
variant_inp=m_ctrlComm.GetInput();//讀緩沖區
safearray_inp=variant_inp;//VARIANT 型變量轉換為ColeSafeArray型變量
len=safearray_inp.GetOneDimSize ();// 得到有效數據長度
for(k=0;k
safearray_inp.GetElement(k,rxdata+k);//轉換為BYTE型數組
}
for(k=0;k
BYTE bt=*(char*)(rxdata+k);
strtemp.Format(“%02X”,bt);// 將字符以十六進制方式送入臨時變量strtemp存放,注意這里應加入一個空隔
m_str+=strtemp;
//加入接收編輯框對應字符串
}
// 微機控制變頻器的參數通過類似COIeVariant的構造函數來實現,COIeVariant 可以接收各種類型的數據(如字符串、整數、浮點數等)并自動將其轉換為符合VARIANT要求的數據。然后就可以根據自己的通訊協議要求加入相應的處理代碼,實現數據的傳遞[6]。
…… //在此可以添加通訊協議代碼
}
}
3.1.3 數據校驗模塊
根據約定的通訊協議,對于上位機發送的命令,不符合協議格式(包括數據頭,尾,數據長度等)時,下位機將不予應答;對于下位機傳送給上位機的數據,處理方式相同。符合協議格式(包括數據頭,尾,數據長度等)時,計算校驗和,校驗和為其前5 個字節數據之和。校驗正確,則進入數據處理模塊,否則,丟棄不予處理。
3.1.4 數據處理模塊
此模塊包括數據解包,數據提取,數據轉換,如將得到的十六進制的頻率數據,以十進制數據方式上傳至上位機顯示。
此外還有等待超時處理模塊,數據傳輸錯誤處理模塊等。
3.2 通訊協議編程實現
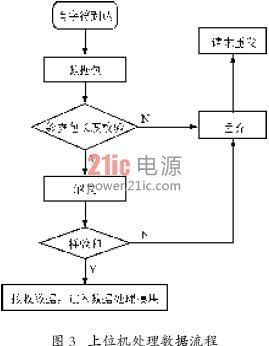
變頻器與微機進行通訊時,首先,作為下位機的發送方先將要發送的數據按協議規定的格式組成數據包,并求出檢驗和,然后連同包頭和包尾一同發送出去。作為上位機的接收方收到數據后,通過軟件實現通訊協議,主要流程如圖3所示。
在軟件實現通訊協議的過程中,處理和校驗數據時,注意要將接收的數據格式轉換為合適的數據格式,否則在調試的時候就會出現錯誤,或者在上位機的控制界面上不能正確顯示。
3.3 界面實現
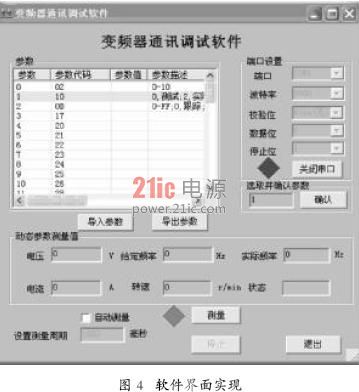
該軟件主要由靜態數據區和動態數據區兩部分組成。靜態數據區包括串口參數的選擇和參數數據的顯示,并可選擇和修改參數命令;由于該變頻器采用應答式通訊,所以在動態數據區中,顯示下位機傳送的數據,同時,在靜態工作區可以導入導出參數;
在動態工作區,可以根據需要,選擇是否進行定時發送測量命令,從而實時監控下位機的工作狀況。靜態數據區和動態數據區兩部分相互配合,實現對下位機的完整控制。如圖4所示。
4 結語
采用Visual C++環境下的MSComm控件對變頻器進行軟件編程,通過變頻器的RS485串口通訊功能,可以實時監控和調整下位機的工作狀態,實現對下位機的集中控制。軟件界面友好,操作方便,具有較強的實用性。


















評論