肢體康復系統中多伺服電機控制單元的設計

摘要:針對目前各類疾病所引起的肢體功能障礙逐年增加而醫護人力資源緊缺的情況,本文主要設計了應用于外部肢體康復設備中的多伺服電機控制系統的硬件組成與軟件程序。該系統主要包含電源模塊,單片機模塊,液晶顯示模塊,按鍵模塊和伺服電機單元。通過單片機內部程序的設定和外部液晶、按鍵等人機互動模塊的輸入,多伺服電機系統能依據指令控制機械手臂運動,完成指定動作。康復訓練治療病人通過外部機械手臂的帶動,完成自身力量不能完成的訓練動作,從而達到康復訓練治療的目的。經過實際檢驗,該系統能較好的完成既定目標與要求。
本文引用地址:http://www.j9360.com/article/201808/386734.htm隨著我國社會經濟的不斷發展,人民生活水平不斷提高,人均平均壽命也大大增長。與此同時,各類疾病所引起的肢體功能障礙也成為中老年群體亟待解決的問題。
應用于肢體康復設備的多伺服電機控制系統是針對肢體功能障礙患者設計的一款電動康復鍛煉裝置。該裝置主要由外部機械骨骼,多伺服電機控制單元,電源模塊,主控制單元,人機互動模塊組成。其中單片機主控制單元采用Kinetis K60控制多伺服電機系統,進而多伺服電機系統驅動機械手臂,幫助佩戴機械手臂的康復訓練者做出預定的康復訓練動作。此外,其本身可記憶多種模式以及不同的康復訓練動作,以此簡化醫務人員的相關工作,提高醫療效率。康復訓練者在該裝置的幫助下做被動康復訓練,能大大降低康復訓練的難度,減少不必要的人力成本。
1 多伺服電機控制系統硬件設計方案與分析
1.1 硬件總體設計方案與分析
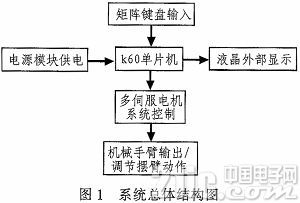
應用于肢體康復設備的多伺服電機控制系統主要由以下幾個模塊組成:電源模塊、矩陣鍵盤模塊、液晶顯示模塊、主控芯片模塊、伺服電機單元以及外部的機械手臂支架。其中,電源模塊負責為其余各個模塊提供穩定的工作電壓;矩陣鍵盤模塊負責外接控制指令的輸入;液晶顯示模塊負責系統運行狀態的顯示;主控芯片是整個系統的大腦,負責按照程序指令對各個模塊進行控制;伺服電機單元受控于單片機,其輸出量直接帶動機械手臂的運動,使機械手臂完成指定擺臂動作。
系統的總體組成框圖如圖1。
1.2 單片機主控模塊
Kinetis K60是飛思卡爾公司推出的inetis單片機系列中一款基于ARMv7的體系結構ARM Cortex—M4內核的32位單片機。片內資源豐富,包含了GPID模塊,EXIT外部中斷模塊,PIT定時器模塊,ADC模塊,DAC模塊,FTMPWM模塊,輸入捕捉模塊,DMA模塊,UART模塊以及I2C模塊。其中GPIO分為A、B、C、D、E 5個端口,每個端口包含了32位IO口資源。所有的普通IO口都可以設置外部中斷,K60包含了4個定時器中斷,兩個獨立的12位DAC模塊,兩個獨立的16位ADC模塊。FTM PWM模塊共有一個8路PWM和兩個2路PWM。
1.3 電源模塊
采用美國國家半導體公司生產的集成穩壓電路LM2576,它內部含固定頻率振蕩器(52 kHz)和基準穩壓器(1,23 V),并具有完善的保護電路,包括電流限制及熱關斷電路等,利用該器件只需極少的外圍器件便可構成高效穩壓電路。LM2576是開關電源,高壓差下效率高,發熱不嚴重,輸出電流大,可達3 A,但是紋波大,干擾大,電流稍微復雜,需要用到電感,7805是串聯穩壓電源,效率差,輸入輸出壓差和電流越大,損耗越大,而且,輸出電流較小,一般在500mA左右,也有1.5 A的型號,但是紋波小,電路簡單,較常用。鑒于我們采用7.2 V電池供電,所以采用輸出散熱較好的LM2576穩壓芯片。
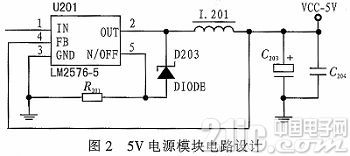
系統的正常工作要有穩定可靠的電源保障。系統中需要的電壓值主要有:7 V,6 V,5 V 3種。7 V電壓主要為電池接入口處,7 V電壓經過兩片LM2576芯片分別產生兩個5 V、6 V兩個不同的電壓值。5 V電壓主要用于K60單片機供電,液晶顯示模塊供電,以及為矩陣鍵盤提供參考電壓。6 V電壓主要用于為多伺服電機控制系統中的舵機供電。
最終電源電路設計如圖2所示。
1.4 伺服電機模塊
選用的舵機工作電壓6 V左右。電源電壓在7.8~7.2 V之間,因此需要穩壓片降壓。開始選用穩壓片LM2576將電壓穩定在6 V,靜態測試穩定效果很好。在實際調試過程中發現,在電源開啟瞬間芯片穩壓值會有突變,對于芯片工作以及舵機轉角造成影響,使得整體控制效果下降。測試其他幾個類型芯片均存在此類問題,最后,決定用二極管降壓。由于二極管不存在電流干擾等問題,而且性能較穩定,完全能夠滿足實際要求。
舵機的控制只需要一路PWM波即可滿足要求。PWM波周期10 ms,不同占空比使舵機轉過角度不同。
2 多伺服電機控制系統軟件設計方案與分析
2.1 系統軟件總體設計方案與分析
軟件運行需要配置單片機各個模塊寄存器數值,使單片機各個模塊正常工作。初始化中包括:單片機時鐘配置、I/O口配置、PWM模塊配置、RTI實時中斷配置、脈沖捕捉模塊配置。當初始化完畢后,開始檢測外部按鍵的輸入,通過判斷不同的按鍵輸入,來決定單片機執行擺臂動作或是舵機擺角值的加減調整。通過改變 PWM模塊內部寄存器數值可以得到不同占空比的方波信號,實現對舵機的調節。
系統的軟件設計流程圖如圖3所示。
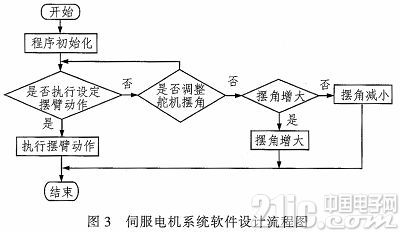
本設計分別為矩陣鍵盤按鍵定義五種不同的功能。當按下一號鍵時,單片機執行內部固有的舵機輸出值,多伺服電機控制系統完成固定擺角,帶動機械手臂完成指定動作;當按下二號鍵時,調整一號舵機值的擺角增大;當按下三號鍵時,調整一號舵機值的擺角減小;當按下四號鍵時,調整二號舵機值的擺角增大;當按下五號鍵時,調整二號舵機值的擺角減小。主程序不斷掃描哪位按鍵被按下,依次判斷所需執行的語句。
2.2 伺服電機模塊軟件設計與分析
伺服電機模塊的控制主要是通過單片機產生的PWM信號調制。在K60單片機中,脈寬調制模塊中有3個獨立的PWM模塊 FTM0,FTM1,FTM2。其中FTM0有8路獨立的可設置占空比的8位PWM通道,每個通道配有專門的計數器。該模塊有4個時鐘源,能分別控制8路信號。通過配置寄存器可設置PWM的使能與否、每個通道的工作脈沖極性、每個通道輸出的對齊方式、時鐘源以及使用方式(8個8位通道還是四個16位通道)。另外的FTM1,FTM2模塊各有兩個PWM通道。這3個模塊內部的周期需保持一致,彼此間的周期可設置不同。
3 結束語
文中相關設計是基于伺服電機特性,利用肢體康復設備這個平臺得以體現該設計的實際作用,本設計可使肢體康復設備正確安全的做出相應的動作,利用轉向伺服電機控制擺臂方向,使肢體康復設備達到應有的性能要求。多伺服電機控制系統是應用于肢體康復設備的主要環節,本系統通過模擬醫護人員的肢體恢復輔助動作,能夠使機器手臂代替醫護人員的一部分工作,減少了醫護人員的壓力。在目前醫護人力資源緊缺的情況下,使用本系統對于患者進行肢體康復訓練無疑能節省大量的人力物力財力,同時擴展了Kine ct技術的應用,具備十分廣闊且實用的前景。











評論