射頻硬件在環技術推動嵌入式系統設計的發展

隨著無線技術更多地嵌入諸如車載雷達和機器對機器通信等“關鍵任務”應用中,新的測試方法也相應出現,以確保系統的可靠性。其中一種RF驅動系統測試方法便是“硬件在環(HIL) 測試”,該測試方法屬于“實時”測試類。今天,小編就將帶你透過美國國家儀器大咖工程師David A. Hall的視角了解HIL測試及其在自動駕駛測試中的發展趨勢。
本文引用地址:http://www.j9360.com/article/201807/383974.htmHIL測試所采用的原理,即認為測試工程師可以創建出測試系統,以仿真現實世界中典型存在實體系統,這并非是新的理念。然而,RF技術在諸如車載雷達等關鍵任務應用中的日益普及,使得HIL測試成為無線應用越來越常用的測試方法。
HIL測試系統的架構
HIL測試的理念最初是作為測試航空航天和汽車工業復雜控制系統的機制而被提出來的。在典型的應用中,工程師可以通過利用HIL測試系統模擬電氣信號和發動機的行為來測試發動機的電子控制單元(ECU)。在本應用中,該測試系統結合了輸入和輸出(常被稱為“I/O”)用模擬和數字模擬接口,以及確定性處理元件,以有效仿真系統(如圖1所示)。

圖1、典型HIL 測試系統方塊圖
近年來,RF技術用作關鍵傳感和通信技術的趨勢使得很多RF系統工程師開始使用相似的測試方法。在典型的RF HIL測試系統中,相對低速的模數轉換器(ADC) 和數模轉換器(DAC) 被替換成了向量信號產生器和分析器。事實上,這些應用中所使用的HIL測試系統在架構上常常跟軟件無線電(SDR) 類似。不過,很多嵌入式處理元件仍保持相同。RF HIL系統的常見應用包括信道仿真、信道測量、實時GNSS模擬、雷達目標生成和認知測試。
最令人振奮的實時測試應用是車載雷達測試——既包括其作為單獨產品,又包括其作為更復雜高級駕駛輔助系統(ADAS) 組成的情況。現代ADAS技術結合了雷達(傳統上是在24GHz 波段,現在日益朝77和79GHz波段發展)、攝像機、超聲波和LIDAR 技術來感測周圍環境。ADAS設計的復雜度覆蓋了從較為簡單的盲點偵測報警指示器到全自動駕駛系統。雖然今天的很多關鍵汽車傳感技術年代都相對較久遠了(事實上,首款車載雷達原型可追溯至1950年代末),但傳感器尺寸和成本的改進以及信號處理技術的進步已經讓自動駕駛系統變得更為可行。
HIL測試用于車載雷達應用
雷達傳感器測試需要工程師驗證裝置的電磁特性和功能特性。例如,典型的RF 測量可能包括輸出功率和脈沖線性(通過解調FMCW輸出進行測量)。同樣重要的還有包括測距精度、距離分辨率以及在受干擾情況下檢測物體的能力等功能特性。
為了測試物理和功能特性,雷達測試中越來越多地使用既可以配置為測量儀器,又可以配置為雷達目標生成器的測試設備。在本例中,測試系統利用其實時信號處理元件從根本上讓雷達傳感器相信其看到的一個物體或目標,而實際上只不過是一臺測試設備。這個過程,被稱為“目標仿真”或“目標生成”,是使用信號處理來重建物體反彈雷達刺激的電磁響應。
圖2所示為雷達目標生成的兩種方法。第一種方法被稱為“被動式目標生成”法,即使用一根延遲線模擬雷達刺激的來回傳播時間。第二種方法被稱為“主動式目標模擬”法,即使用HIL 測試系統以數字方式重建雷達系統的環境。在典型的主動式目標模擬器中,由寬帶向量信號分析器接收來自雷達傳感器的刺激。儀器上載有的嵌入式處理器向模擬距離和都卜勒位移施加延遲作用,以模擬速度。最后,由向量信號產生器將這一數字創建的雷達環境生成信號,反饋回雷達傳感器。
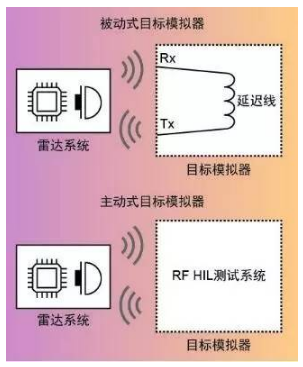
圖2、被動式雷達目標生成器與主動式雷達目標生成器
對于給定的應用,根據所模擬的對象類型,可以選擇被動式雷達目標模擬或主動式雷達目標模擬方法。例如,被動式模擬器在模擬短距離目標方面性能更好,而主動式模擬器則可以模擬更為復雜的駕駛場景,如變道或物體穿過馬路。
奧迪使用HIL測試助力駕駛測試
NI已經聯手多家領先的汽車制造商致力于改進下一代雷達測試技術。例如,在德國奧迪公司著手開發全自動駕駛汽車的開拓性研究工作中,NI最近便與其進行了合作。
奧迪團隊認識到,安全和可靠性是新一代自動駕駛汽車的重點。因此,奧迪采用HIL測試在實驗室環境下模擬ADAS系統環境。通過在實驗室模擬典型的駕駛測試,奧迪實現了在設計過程中提早改進嵌入式軟件可靠性,甚至能夠發現原本要等到實際駕駛測試才會暴露的故障。
圖3所示的奧迪目標仿真系統結合了NI的第二代向量信號收發器(VST) ,配有專為79GHz雷達頻帶設計的上轉換器和下轉換器。在本場景中,VST起到了軟件無線電的功能,且使用LabVIEW可編程FPGA能夠為仿真雷達目標執行實時信號處理例行程序。奧迪股份公司雷達組件負責人Neils Koch博士表示“PXI VST實現了寬帶和低時延軟件的結合,使得我們可以在雷達模塊中發現原本無法檢測到關鍵故障”。
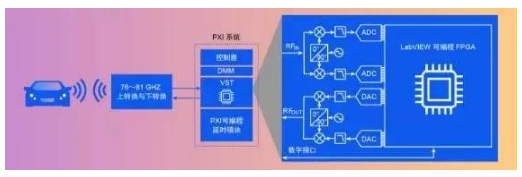
圖3、奧迪主動式目標仿真系統方塊圖
ADAS趨勢
展望未來,結合多重傳感技術,利用每個技術的比較優勢是ADAS設計的大勢所趨。例如,在測量物體距離(甚至是在夜間或多霧條件下)方面,雷達通常都是最精確的技術。然而,基于攝像頭的圖像識別在確定物體的準確位置方面則更為精準。通過將多種傳感器的輸入整合入“傳感器融合”架構,能夠提升ADAS 感測周圍環境的能力(如圖4所示)。
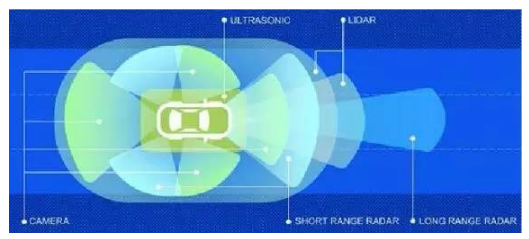
圖4、自動駕駛汽車集成多重傳感技術
傳感器融合,加上對將諸如神經網絡算法用于對象檢測的依賴性的提升,將長期持續提升嵌入式軟件測試的重要性。未來,工程師將更多地將雷達測試與高度同步且極其靈活的HIL測試系統內的其它嵌入式傳感器技術相結合。
RF HIL測試的其它應用
雖然雷達目標仿真是一項短期來看很可能影響消費者的HIL應用,但這卻只是RF HIL測試新興應用的一個方面。例如,在國防工業,工程師采用相似的測試策略模擬先進電子環境。此外,在無線產業,工程師也將相似的HIL技術用于越來越復雜的實時信道測量。
如今的RF HIL測試系統與工程師在5G通信系統原型化方面所使用的高級軟件無線電技術在架構上驚人地相似。與雷達目標仿真相似,實時對刺激信號進行解譯和反應必須具備寬帶RF前端和密集型信號處理元件。因此,諸如諾基亞、英特爾和三星等公司實現5G系統原型化的諸多相同技術創新與更廣泛的RF HIL測試應用其實是相同的技術。
結論
諸如自動駕駛汽車等日益復雜的系統正快速改寫測試和測量設備供應商設計儀器所必須遵循的規則。過去,儀器只是報告信號模擬特性的機制。如今,儀器還被用來報告系統的功能特征。今后,軟件技術將成為工程師構建越來越復雜的測量系統,以報告從最簡單的RF組件到全自動駕駛汽車特性的關鍵技術。對于測試設備供應商而言,軟件仍是關鍵的投資領域,且通過軟件區分產品的能力將最終定義行業內誰輸誰贏。

評論