愛普生開始交付兩款新型IMUs:M-G370和M-G365

精工愛普生公司(TSE:6724,以下簡稱“愛普生”)于2018年4月3日在東京宣布,已經開發并在最近開始交付兩款新型高性能六軸慣性測量單元*1(以下簡稱“IMU”)的樣品:M-G370和M-G365。M-G370具有FOG*2級性能,而M-G365將成為愛普生新一代IMU的標準,據悉這兩種型號產品計劃在2018年年底實現量產。
本文引用地址:http://www.j9360.com/article/201805/380704.htm
早在2011年,愛普生就發布了旗下首款IMU,可以正確檢測出從微小的傾斜到大范圍動作在內的慣性運動信息。自此,愛普生 IMU便在航空航天以及工業產品中得到了廣泛應用,并因杰出的質量和性能而贏得高度贊譽。
隨著自主精密農業機械、智能施工機械和無人機應用的快速發展,小型高性價比、高精度定位裝置的需求與日俱增,而愛普生最新開發的M-G370和M-G365憑借出色的表現為自動駕駛和導航提供FOG*2級性能。此外,M-G370和M-G365還保持了與早期型號M-G364和M-G354的向后兼容性,能輕松實現性能升級。
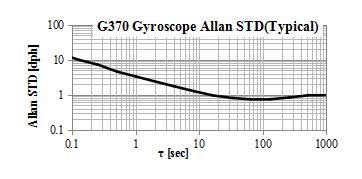
對于具有FOG*2級性能的M-G370來說,憑借高精度和高穩定的測試性能,被廣泛應用于慣性導航和對位置測量精度要求高的領域,如自主駕駛、無人駕駛等領域。M-G370還搭載了最新開發的陀螺傳感器*3,極大提高了零偏穩定性*4 (0.8°/小時)、角隨機游走*5和噪音性能。并且最新開發的加速度計大大提高了零偏穩定性(達到6 uG,而M-G364的零偏穩定性為50 uG),初始零偏誤差為2 mg (1σ)。
作為新一代IMU標準的M-G365,安裝簡單,具有新的姿態角輸出功能并支持各種應用,并且具有擴展卡爾曼濾波器*6的高速DSP*7能以較低功耗提供高精度實時姿態角輸出(橫滾角/俯仰角/偏航角)*8,可廣泛適用于車輛、船只及其他多種工業產品和系統,用來測量數據和控制運動等,而且系統端不再需要動態姿態角的高速計算,從而減小了系統載荷和功耗。
值得一提的是,新型M-G370和M-G365均采用了最新開發的高性能傳感器,具有穩定性更好、噪音更低、動態范圍更廣的優越特點。而且動態性能出色(比例因子非線性),非常適合從靜態到高速運動的高精度測量。與此同時,M-G370和M-G365的向后兼容性,更是大大降低了用戶開發成本和評價時間,更有較低的電流消耗(16 mA,而M-G364和M-G354為18 mA)。
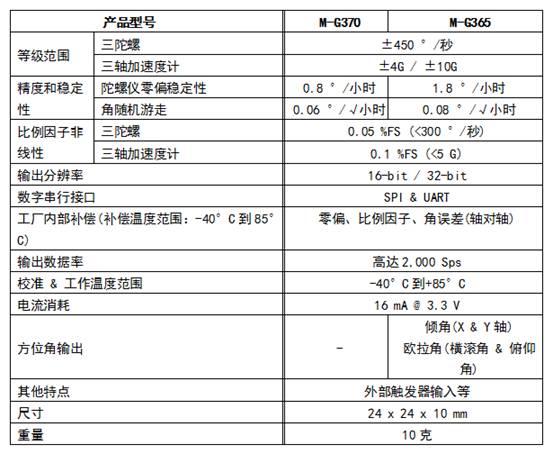
愛普生M-G370和M-G365產品技術規格
應用實例
精密農業和建筑機械的自主駕駛和無人控制。
無人設備,如工業無人機、地面車輛和水下設備。
導航系統(GNSS*9、INS*10、高精度定位儀)。
云臺相機和天線穩定系統。
工業設備和車輛的振動、角度和路徑測量。
相關鏈接
有關這些產品的更多細節請查看以下鏈接。
術語說明
*1 慣性測量裝置(IMU)是用于感應慣性運動的設備。它有三軸角速度傳感器和三軸加速度計組成。
*2 光纖陀螺儀(FOG)是一種在少量高性能IMU中使用的、基于光纖和光干涉特性的陀螺傳感器。
*3 陀螺傳感器(角速度傳感器)測量單位時間上某物體關于參考軸的旋轉角度(角速度)。
*4 零偏穩定性是一個衡量規定取樣時間和平均時間間隔上計算的陀螺儀零偏隨機變化的指標,該零偏變化用1/f噪聲密度表示。
*5 角隨機游走是一個衡量規定取樣時間和平均時間間隔上計算的陀螺儀零偏隨機變化的指標,該零偏變化用隨機噪聲密度表示。
*6 擴展卡爾曼濾波器利用模型估值和實際觀察值依次計算最可能值,以便更準確地預測觀察值中的信息,包括濾波器誤差。
*7 數字信號處理器(DSP)是處理數字信號的高速運算電路。
*8 方位角(橫滾角、俯仰角和偏航角):
橫滾角:物體沿其縱軸旋轉的角度
俯仰角:物體沿其橫軸旋轉的角度
偏航角:物體沿其垂直軸旋轉的角度
*9 全球導航衛星系統(GNSS)是一種用于準確指出地球上任意一處地理位置的衛星系統。
*10 慣性導航系統(INS)







評論